




Nachdem wir gesehen haben, wie man die Flugbahn definiert, werden wir uns nun fragen, wie wir ihr folgen können.
In diesem Artikel werden wir uns kurz mit der Funktionsweise der verschiedenen Navigationsmittel befassen und feststellen, dass es sich hierbei um eine Art Geschichte handelt, auch wenn nicht alle Leichtflugzeuge über die neuesten technischen Entwicklungen verfügen und immer noch wie Mermoz (oder fast) segeln. !
DER MAGNETISCHE KOMPASS
Das erste Navigationsinstrument war sicherlich der Magnetkompass.
Es waren die Chinesen, die um das Jahr 1000 als erste einen Magneten nutzten, um sich am Erdmagnetfeld zu orientieren.
Es scheint auch, dass Zugvögel das Erdmagnetfeld für ihre langen Reisen nutzen ...
Der Magnetkompass besteht aus einer Kursrose, die an einen Permanentmagneten gekoppelt ist.
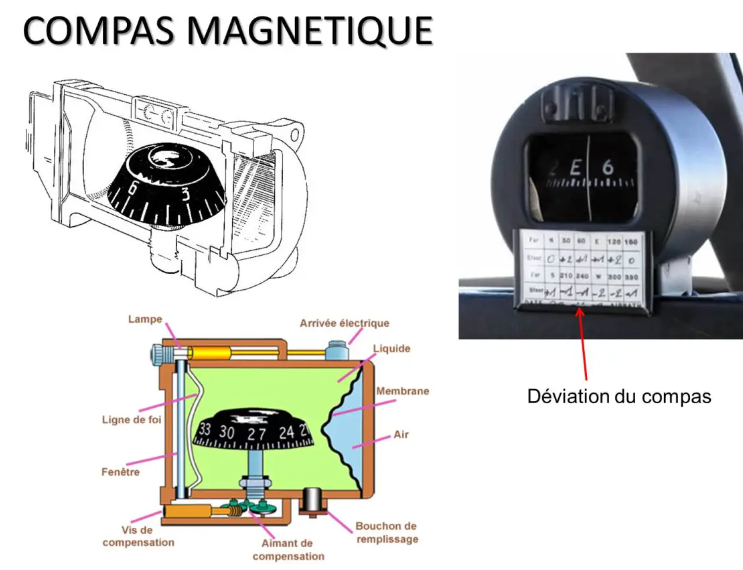
Unter seiner Kurslinie können wir den magnetischen Kurs ablesen, dem das Flugzeug folgt, oder genauer gesagt, was wir den Kompasskurs nennen. Es scheint daher das ideale Werkzeug zu sein, um einer Rhumb-Linie mit konstantem Kurs zu folgen!
Doch der Magnetkompass weist mehrere Mängel auf.
Da der Magnetkompass im Wesentlichen aus einem Magneten besteht, reagiert er empfindlich auf die Metallmassen und die elektromagnetischen Felder des Flugzeugs, was seine Anzeigen mit einem Fehler verfälscht, der als Kompassabweichung bezeichnet wird. Sie wird regelmäßig an jedem Flugzeug von Wartungsdiensten gemessen und auf dem Instrument angezeigt.
Daher muss die Kompassanzeige um diese Abweichung korrigiert werden, um den tatsächlichen magnetischen Kurs zu bestimmen.
Darüber hinaus ist seine Referenz nicht der wahre Norden in Richtung des Nordpols, sondern ein magnetischer Nordpol, dessen geografische Position nicht genau der des Nordpols entspricht.
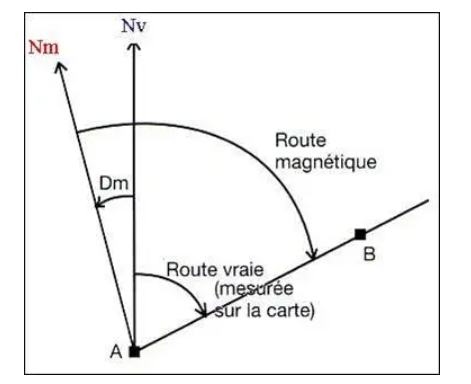
Die Differenz zwischen Nv und Nm wird als magnetische Variation Dm oder im Englischen als magnetische Variation (VAR) bezeichnet. Sein auf Karten angegebener Wert variiert von Ort zu Ort auf der Welt und ändert sich allmählich von Jahr zu Jahr.
Je nachdem, ob der magnetische Norden östlich oder westlich des wahren Nordpols liegt, wird er mit E oder W bezeichnet.
Um mit einem solchen Kompass der auf der Karte gemessenen wahren Route Rv zu folgen, muss diese um den Wert der Deklination korrigiert werden, um die magnetische Route Rm zu ermitteln. Bei einem längeren Kurs der Loxodrome ändert sich die Deklination. Wir müssen daher den Rm weiterentwickeln, um auf der Straße zu bleiben. Wenn wir umgekehrt Rm konstant halten, folgen wir nicht genau der Rhumb-Linie.
Ist die Deklination in Frankreich derzeit sehr gering oder sogar Null, kann sie in bestimmten Regionen, zum Beispiel in Neufundland, in Kanada, mehr als 20° und im Norden des Landes (34° W) sogar 40° oder 50° erreichen in Iqaluit)! In diesem Fall können wir es nicht vernachlässigen ...
Weitere Informationen zu diesem Thema finden Sie im Artikel über Bordinstrumente: http://www.flightsim-corner.com/aller-plus-loin/navigation/instruments-de-bord
Der Magnetkompass ist nach der horizontalen Komponente des Erdmagnetfeldes ausgerichtet. Seine Rosette wird durch ein Gegengewicht oder ein Schwimmersystem annähernd horizontal gehalten.
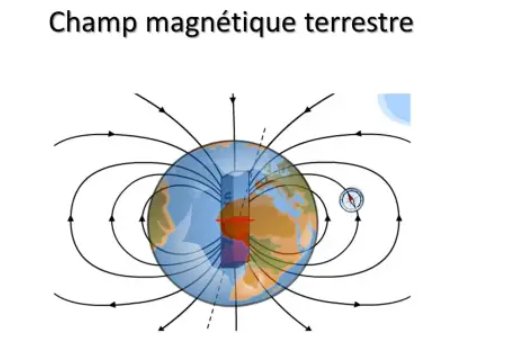
In Polarregionen wird die horizontale Komponente aufgrund der Form der Flusslinien des Erdmagnetfelds sehr schwach. Wir gehen davon aus, dass die Kompassanzeigen nicht mehr gültig sind, wenn diese horizontale Komponente weniger als 6 Mikrotesla beträgt.
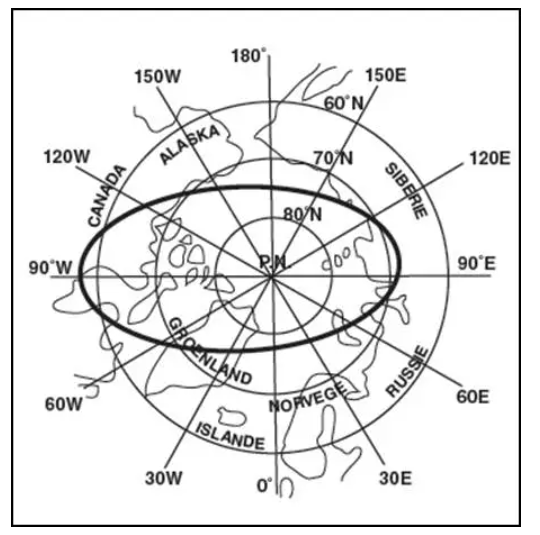
Die dieser Situation entsprechenden geografischen Gebiete sind auf den Karten dieser Regionen angegeben.
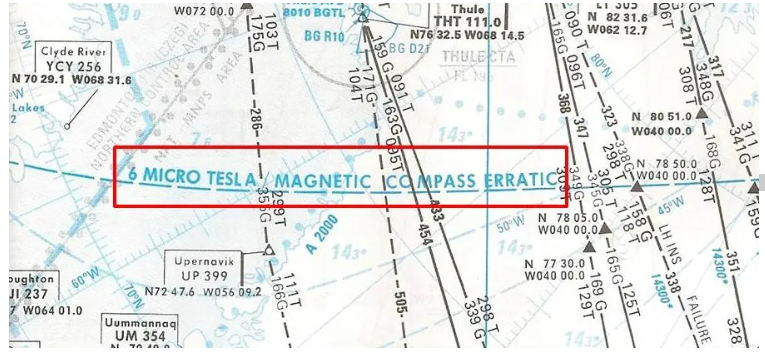
FSX oder P3D scheinen von diesem Problem nicht betroffen zu sein und simulieren daher nicht den Gültigkeitsverlust des magnetischen Kurses in diesen unwirtlichen Regionen ...
Darüber hinaus sind die Anzeigen des Magnetkompasses instabil und empfindlich gegenüber Turbulenzen. Beim Neigen der Ebene ist der Magnetsensor nicht mehr horizontal, was die Messung stört. Darüber hinaus ist der mit einem Gegengewicht ausgestattete Magnetkompass beschleunigungsempfindlich.
Daher sind seine Anzeigen nur im stabilisierten Horizontalflug gültig, was die Verwendung in Kurven erschwert und die Steuerung des Flugzeugs beispielsweise durch einen Autopiloten unbrauchbar macht.
DER KAP-KONSERVATIVE
Um eine Reihe von Mängeln des Magnetkompasses zu beheben, wurden die Eigenschaften des Gyroskops genutzt. Dies hat den Vorteil, dass eine feste Richtung in Bezug auf den absoluten Raum beibehalten wird, was Vor- und Nachteile hat.
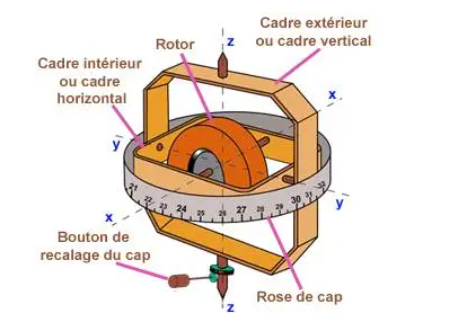
Der Kurskonservator oder Richtungskreisel ist mit einem Gyroskop mit zwei Freiheitsgraden (zwei Rahmen) ausgestattet, dessen Kreiselachse horizontal gehalten wird.

Im Gegensatz zum Magnetkompass sind seine Anzeigen sehr stabil und er lässt sich hervorragend beim Drehen nutzen. Andererseits muss es an einer Nordreferenz, dem magnetischen Norden, dem wahren Norden oder dem Gitternord ausgerichtet sein. Darüber hinaus muss es häufig nachjustiert werden, da es aus mehreren Gründen diese Kalibrierungsreferenz nur für kurze Zeit beibehält:
- Erstens ist das Gyroskop nicht perfekt, es wird seine Richtung im Verhältnis zum absoluten Raum nicht für immer beibehalten: Wir nennen dies mechanische Präzession, die von der mechanischen Qualität des Gyroskops abhängt. Dann dreht sich die Erde darauf – sogar, wenn Die Achse des Gyroskops bleibt beispielsweise auf einen Stern gerichtet (absoluter Raum), er dreht sich daher auf die gleiche Weise, wie sich die Sterne am Himmel zu drehen scheinen: Dies ist eine astronomische Präzession. Sein Wert hängt von der Breite ab, auf der wir uns befinden, und beträgt 15° x sin L pro Stunde, null am Äquator, aber maximal an den Polen. Es dreht den Norden des Kreisels auf der Nordhalbkugel nach rechts und auf der Südhalbkugel nach links, selbst wenn das Flugzeug stationär auf dem Boden bleibt! Und wenn wir auch wollen, dass es den wahren Norden (oder den magnetischen Norden bei konstanter Deklination) anzeigt , sollten wir auch die Konvergenz der Meridiane korrigieren, wenn wir uns auf der Erde bewegen: Das ist die Präzessionskarte!
Es ist natürlich zu kompliziert, sich bei einem kurzen VFR-Flug darum zu kümmern! Es ist jedoch gut zu wissen, dass all diese Präzessionen die Genauigkeit der von Ihrem Überschriftenkurator angezeigten Überschrift beeinträchtigen. Wenn sie in die gleiche Richtung zeigen, addieren sie sich und wir können zu wichtigen Werten gelangen! Es ist daher notwendig, den Kurs sehr regelmäßig konservativ nachzujustieren. Im Allgemeinen verwenden wir den Kurs des Magnetkompasses, um den Kurskurator zurückzusetzen.
FSX, P3D und X-Plane können diese Präzessionen simulieren, sofern die Funktion aktiviert ist. In diesem Fall ist es daher notwendig, den Richtungskreisel regelmäßig nachzujustieren...
DER GYROMAGNETISCHE KOMPASS
Prinzip
Wir entdecken also, dass die Eigenschaften des Richtungskreisels praktisch den Mängeln des Magnetkompasses entsprechen und umgekehrt. Daher kam es ganz natürlich vor, beides zu kombinieren, um den gyromagnetischen Kompass zu entwerfen.
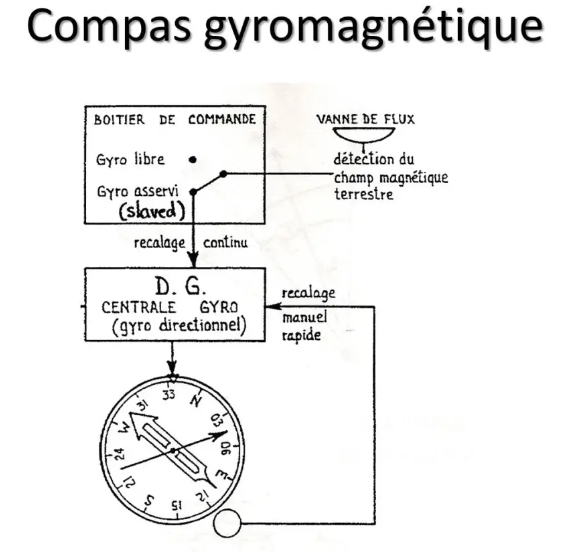
In diesem Fall wird der Gyroskopkurs automatisch mit dem magnetischen Kurs synchronisiert. Eine Neujustierung des Kreisels ist nicht mehr erforderlich. Der Magnetsensor ist ein Strömungsventil, das meist am Ende des Flügels installiert wird, um sich von Eisenmassen und elektrischen Feldern zu entfernen, das magnetische Kursinformationen in elektrischer Form liefert und den gyroskopischen Kurs über eine Kompasskupplung synchronisiert. Dies ist der SLAVED-Modus.
Um diesen gyromagnetischen Kompass in der 6-Mikrotesla-Zone verwenden zu können, ist geplant, die Synchronisierung mit dem magnetischen Kurs zu deaktivieren: Dies ist der DG- oder Free-Gyro-Modus, in dem das System genau als Kurskurator fungiert. Der Unterschied besteht jedoch darin, dass dieses System ausgefeilter und daher teurer ist und das Gyroskop von guter Qualität mit sehr begrenzter mechanischer Präzession ist.
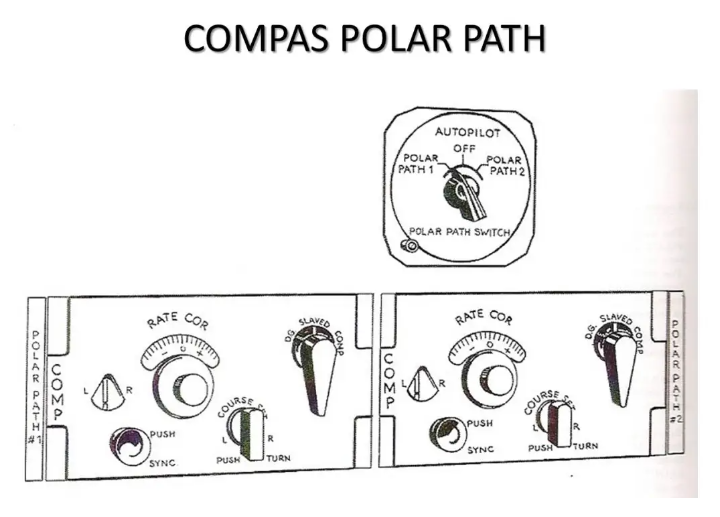
Der Kompass vom Typ POLAR PATH
Die ausgefeiltesten Formen dieses Systems wurden in Langstreckenflugzeugen gefunden, die der Einführung von Trägheitskraftwerken vorausgingen.
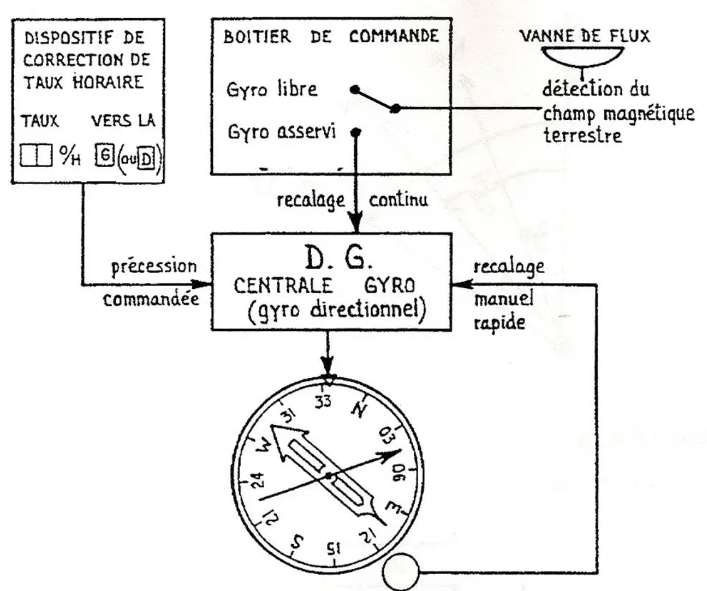
So waren die B707 oder die DC8 mit einem Kreiselkompasssystem vom Typ Polar Path ausgestattet, das es ermöglichte, im Free Gyro-Modus eine Zeitkorrekturrate auf den Kreiselkompass anzuwenden. Wir könnten dann bei konstantem Kreiselkurs der Kartenlinie jeder Karte folgen, insbesondere den transversalen oder schrägen Mercatoren.
Aber dafür war es besser, einen erfahrenen Navigator an Bord zu haben, der seine Navigation regelmäßig mit anderen Mitteln wie Fernfunkmitteln oder astronomischer Navigation neu justierte: also eine Angelegenheit für Profis!!!
Die Flugzeuge, die dieser ersten Generation von Langstreckenjets folgten, wie die B747-100/200/300 oder die DC10, waren noch mit diesem Systemtyp ausgestattet, aber die gyroskopischen Kursinformationen stammten vom Azimutkreisel der Plattformen bei INS-Trägheit.
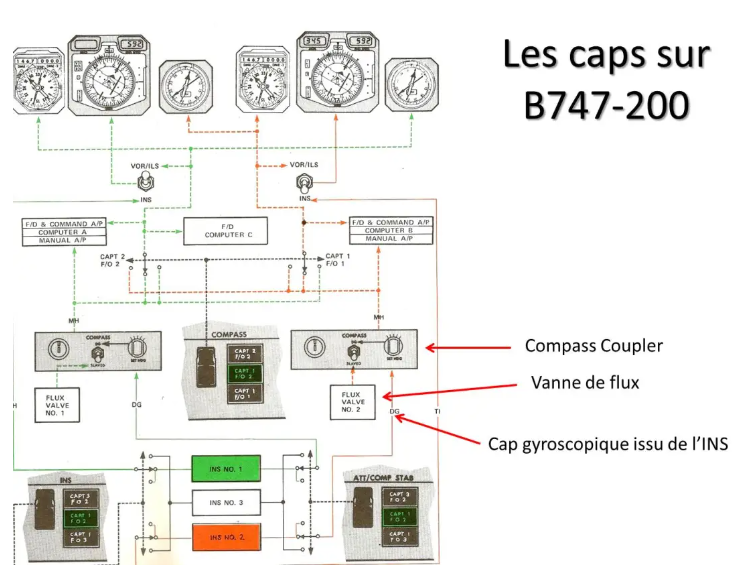
Der Kompasskoppler war noch mit seinen beiden möglichen Modi SLAVED oder DG vorhanden (zum Vergrößern auf das Bild klicken).
Die DC10 hatte mit ihrem Litton 58 INS die Besonderheit, dass sie einen Kreiselkurs lieferte, der um die mechanische Präzession (sehr schwach, einige Zehntel Grad pro Stunde) und die astronomische Präzession korrigiert war, was zur Aufhebung der Erdrotation führte. Wir folgten daher bei konstantem Kreiselkurs einer Geraden im Verhältnis zur Erde, also einer Orthodromie.
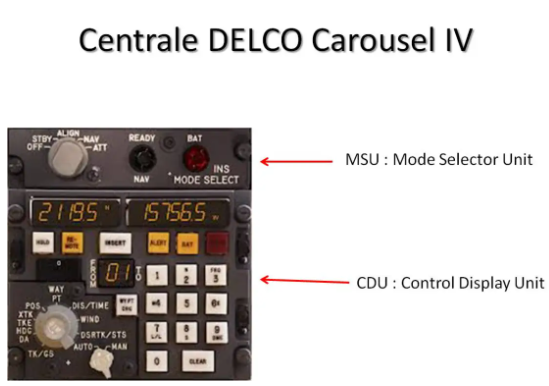
Auf B747 wies das INS DELCO Carrousel IV diese Besonderheit nicht auf, und ihre mechanische Präzession, die während der Ausrichtung gemessen und im Speicher gespeichert wurde, konnte sehr hohe Werte in der Größenordnung von 12°/h erreichen, was zur astronomischen Präzession beitrug könnte in den Polarregionen bis zu 27°/h erreichen!!!
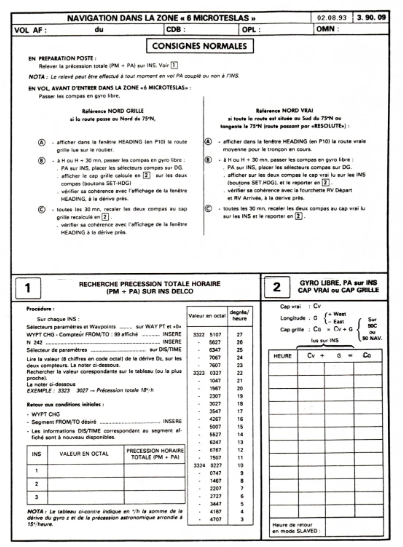
Ein sehr kompliziertes Notfallverfahren ermöglichte es, diese mechanische Präzession zu kennen und dank eines speziellen Blattes den Kreiselkurs zu berechnen, der im Notfall zur Austrittszone von 6 Mikroteslas verwendet werden musste.
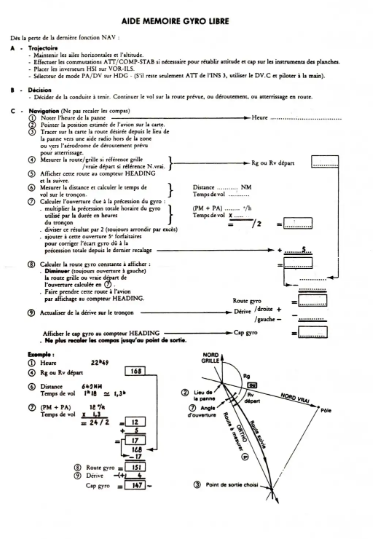
Wir verstehen besser, warum es notwendig war, einen bestimmten Kurs zu absolvieren, bevor man sich in solche Gebiete vorwagte.
Was den erfahrenen Navigator betrifft, so wurde er natürlich mit der Ankunft des INS ausgeschifft … das ist ein Fortschritt!!!
DEN WIND BERÜCKSICHTIGEN
Bei allem, was wir gerade gesehen haben, ging es uns nur darum, möglichst genau auf Kurs zu bleiben. Aber der Weg, dem man folgen muss, ist eine Straße! Und natürlich können wir nicht daran denken, nur an windstillen Tagen zu fliegen!
Das Geschwindigkeitsdreieck
Der Einfluss des Windes wird im Geschwindigkeitsdreieck hervorgehoben: Der Geschwindigkeitsvektor relativ zur Luft richtet sich nach dem Kurs und seine Messung entspricht der natürlichen TAS-Geschwindigkeit.
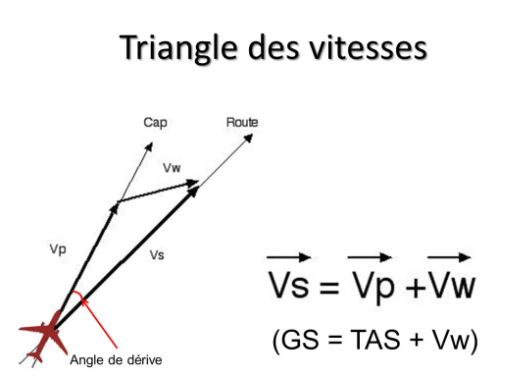
Indem wir die Vektorsumme mit dem Windvektor bilden, erhalten wir den Geschwindigkeitsvektor über Grund, der entlang der zurückgelegten Route ausgerichtet ist. Der Winkel zwischen Kurs und Kurs wird Driftwinkel genannt.
Diese wunderschöne Zeichnung lässt sich sehr leicht auf Papier nachzeichnen, während es im Flug viel schwieriger ist! Und vor allem muss man den Wind einigermaßen genau kennen.
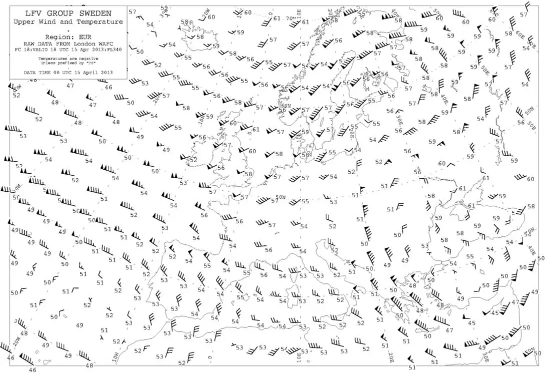
Im Hinblick auf die Flugvorbereitung stellen Wetterdienste Vorhersagen in Form von Windvorhersagekarten in verschiedenen Höhen bereit.
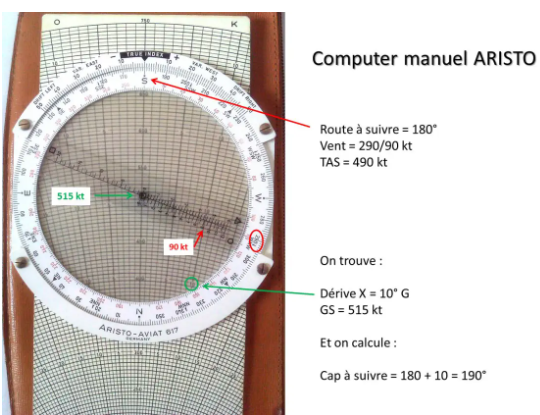
Präzise mathematische Methoden, näherungsweise gedankliche Berechnungen oder der Einsatz manueller oder elektronischer Computer ermöglichen es dann, den Driftwinkel und die Geschwindigkeit über Grund zu ermitteln. Wir wissen daher, welchen Kurs wir einschlagen müssen, um der geplanten Route zu folgen, und auch die Geschwindigkeit über Grund, mit der wir diese Flugbahn zurücklegen werden.
Hier erfahren Sie beispielsweise, wie Sie mit dem speziellen ARISTO-Computer Drift und Geschwindigkeit über Grund berechnen.
Aber das ist nur eine Vorhersage! Und jeder weiß, dass es zwischen Vorhersage und Realität immer eine manchmal erhebliche Fehlerquote gibt ...
Daher war es notwendig, Möglichkeiten zu finden, den während des Fluges auftretenden Wind zu beurteilen. Und das ist nicht ganz einfach!
Wenn Sie das Glück haben, in Sichtweite des Bodens zu sein, können Sie die Drift visuell beurteilen, indem Sie Markierungen in der Achse des Flugzeugs beobachten: nicht sehr präzise ...
Der Ableitungszähler
Durch die Verfolgung einer Bodenmarkierung auf einem Fadenkreuz ermöglichte das Driftometer die Messung der Drift... bei gutem Wetter und eher tagsüber und über dem Boden!!!

Bestimmte Derivometer (sogenannte Kinemo-Derivometer) ermöglichten es auch, die Geschwindigkeit über Grund auszuwerten.

Und dann ist da immer noch der Zeitpunkt eines Kurses, der seine Berechnung ermöglicht. Aber wir sehen sofort, dass die Präzision nicht gegeben sein wird und auf langen Seereisen sogar praktisch unmöglich sein wird!!!
Isobare Navigation
Ein anderes, lange aufgegebenes System wurde auf See zur Bestimmung von Seitenwind und Drift eingesetzt. Das nennen wir isobare, Druck- oder D-Faktor-Navigation.
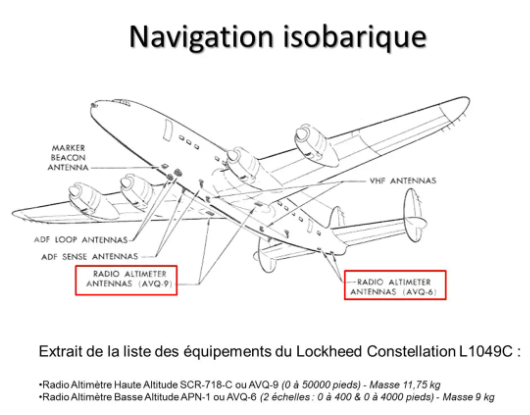
Es war notwendig, über einen Funkhöhenmesser für große Höhen zu verfügen, der in der Lage ist, die tatsächliche Höhe zu messen, der es im Vergleich zur Druckhöhe (Faktor D) ermöglicht, die Querkomponente des geostrophischen Windes (theoretischer Wind) und damit die Drift zu berechnen... Eine weitere Frage des professionellen Navigators!
Doppler-Browser
Es sind auch präzisere elektronische Systeme entstanden. Dies ist beim Doppler-Effekt-Browser der Fall.
Wenn Sie sich am Rande eines Autokreises befinden, ändert der Ton des ankommenden Autos seinen Ton, wenn es vor Ihnen vorbeifährt und sich wegbewegt: Es ist der Doppler-Effekt, der dazu führt, dass die Frequenz des vom Mobiltelefon abgegebenen Tons verändert wird durch seine Geschwindigkeit. Möglicherweise waren Sie ein Opfer, ohne es zu wissen, da einige Straßenradargeräte nach diesem Prinzip funktionieren!
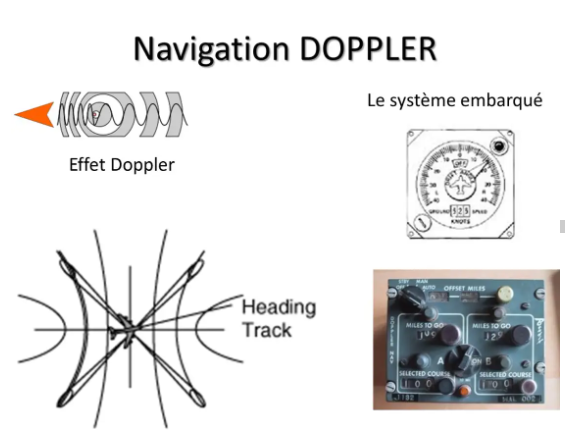
Auch in der Luftfahrt wurde es zur Messung der Bodengeschwindigkeit von Flugzeugen und durch Kombination mehrerer Empfänger auch zur Messung der Drift eingesetzt. Das Instrument oben und rechts zeigte Geschwindigkeit und Drift über Grund an.
Es war möglich, es an einen Koppelnavigation-Totalisator (unten rechts) zu koppeln und das System dann vom Autopiloten (DC8 UTA) zu nutzen.
Aber die Präzision war trotz allem nicht außergewöhnlich, und die zu glatte Oberfläche bestimmter Gewässer (z. B. ruhige See) führte dazu, dass die Rücksignale verloren gingen. Anschließend wurde mit den zuletzt gespeicherten Messwerten weiter navigiert…!!!
ANDERE NAVIGATIONSMITTEL
Wir verstehen daher, dass es zu diesem Zeitpunkt notwendig war, andere Mittel zur Verfügung zu haben, um die Navigation zumindest in regelmäßigen Abständen neu zu kalibrieren, um eine angemessene Präzision zu erreichen ...
Astronomische Navigation
Eines der am einfachsten umzusetzenden Anpassungsmittel war, analog zur Marine, die astronomische Navigation. Aber im Gegensatz zu Booten wird die hohe Reisegeschwindigkeit von Flugzeugen, insbesondere Jets, das Problem erheblich verkomplizieren: Ein Besatzungsmitglied wurde speziell für diese Arbeit eingesetzt, die große Sorgfalt bei der Anwendung der Verfahren erforderte.
Bei Druckflugzeugen wurde ein periskopischer Sextant verwendet, um einen Panoramablick über das Flugzeug zu ermöglichen, der mit einem System zur Messung der Sternhöhe während der zwei Minuten, die die Sichtung jedes Sterns dauerte, ausgestattet war.
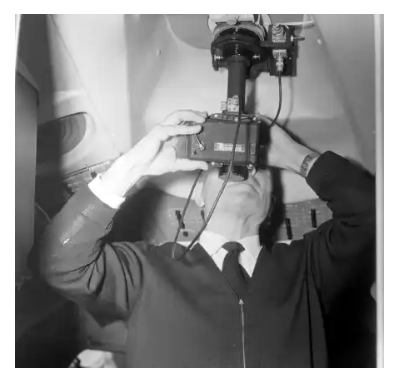
Auch hier war die Präzision sehr relativ und ließ nur im Nachhinein eine Abweichung erkennen, ohne den weiteren Verlauf des Fluges vorhersehen zu können ...
Langstreckenfunk bedeutet
Neben den klassischen Funkmitteln VOR und NDB, die bis zur Grenze ihrer nutzbaren Reichweite, etwa 200 Nm, genutzt werden konnten, gab es Langstreckenmittel, die es ermöglichten, die Navigation durch Koppelnavigation zurückzusetzen.
Die Konsole
Das Consol war ein verbessertes Funkfeuer, das im 250-350-kHz-Band sendete. Abhängig von der Position des Flugzeugs im Verhältnis zum Leuchtfeuer erhielten wir eine bestimmte Anzahl von Punkten und Morsecode-Zeilen, die gezählt werden mussten, die den auf den Karten eingezeichneten Positionspositionen entsprachen.
Ein Leuchtfeuer dieser Art befand sich in der Bretagne bei Ploneis in der Nähe von Quimper. Sie wurde 1970 verhaftet.
Der Loran
Loran (Long RAnge Navigation) ist ein hyperbolisches Positionierungssystem, das aus zwei Sendern besteht, einem Master und einem „Slave“. Die Positionierung erfolgt durch Messung der Differenz der Ausbreitungszeiten des von den beiden Sendern ausgesendeten Signals, wobei der Ort der Punkte mit der gleichen Differenz eine Hyperbel bildet.
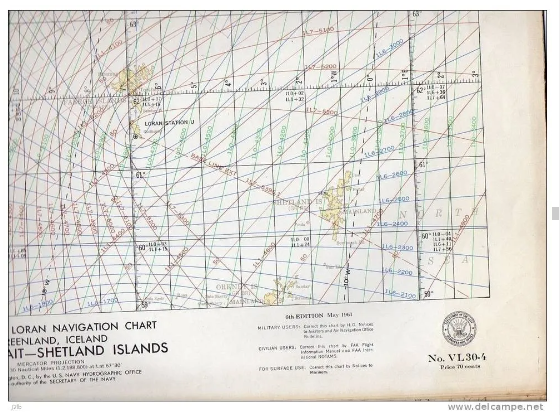
Auf den Navigationskarten waren die Hyperbelnetze der verschiedenen Senderpaare eingezeichnet.
Es wurden mehrere Versionen entwickelt: Loran A, Loran C, Loran E. Loran C ist immer noch als Backup-Gerät für Boote im Falle eines GPS-Ausfalls im Einsatz.
Ebenso wie die astronomische Navigation erforderte der Einsatz dieser Funkgeräte an Bord von Flugzeugen die Anwesenheit eines Navigators und für Loran spezielle Empfangsgeräte ...
Aber was die astronomische Navigation betrifft, so verfügen wir auch hier nur über Mittel zur Kontrolle der Position im Nachhinein, die nur eine Neukalibrierung der Navigation ermöglichen, die a priori durch Koppelnavigation durchgeführt wird, mit allen Gefahren, die die Position zwangsläufig verschlechtern Präzision.
Das OMEGA-System
Ein kurzes Wort am Rande zu einem System, das im Inventar der Langstreckenfunkressourcen nur kurz auftauchte. Das OMEGA-System, das von der amerikanischen Armee Ende der 1960er Jahre, mitten im Kalten Krieg, eingerichtet wurde, funktionierte nach dem gleichen Prinzip wie LORAN, jedoch in einem viel niedrigeren Frequenzbereich, dem VLF-Band (Very Low Frequency). ), etwa 12 kHz.
Acht Sender ermöglichten die Abdeckung aller Weltmeere. Nur einer befand sich auf französischem Territorium, an der Westküste der Insel La Réunion. Die Höhe der Antennenmasten, etwas über 400 m, machte sie oft zu den höchsten Bauwerken des Landes…!
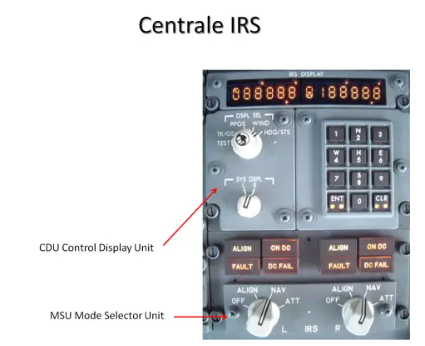
Die Installation an Bord der Flugzeuge umfasste einen vollautomatischen Empfänger und eine CDU, die mit der des INS durchaus vergleichbar war, über die wir gleich später sprechen werden.
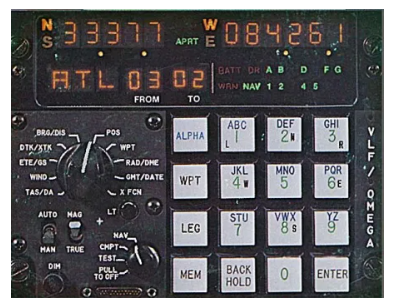
Die nominelle Genauigkeit lag bei etwa 1,5 Nm, Ausbreitungsprobleme in diesem Frequenzbereich könnten sie jedoch erheblich verschlechtern. Dennoch wurde das OMEGA-System in Verbindung mit einem INS-System als Navigationsmittel im MNPS-Gebiet des Nordatlantiks zertifiziert.
Die Einführung von Satellitensystemen wie GPS bedeutete sehr schnell das Ende des OMEGA-Systems für die Zivilluftfahrt. Da die Wartungskosten der Bodenstationen sehr hoch waren, wurde 1997 beschlossen, sie einzustellen.
Trägheitsnavigation
Ideal wäre es daher, das Flugzeug so ausrichten zu können, dass es direkt der gewählten Route folgt, ohne den Kurs durchlaufen zu müssen, und zu wissen, wie man die tatsächliche Geschwindigkeit im Verhältnis zum Boden misst, unabhängig von den Flugbedingungen ... !
Die Lösung wird die Trägheitsnavigation sein.
Dies ist keine neue Idee, da ein solches System bereits während des Zweiten Weltkriegs zur Lenkung von Raketen, insbesondere der deutschen V1 und V2, eingesetzt wurde. Die Schwierigkeit bestand darin, Geräte herzustellen, die ausreichend zuverlässig und präzise waren, um auch bei mehrstündigen Flügen im Rahmen des Alltagsbetriebs eingesetzt werden zu können.
Funktionsprinzip
Das Prinzip besteht darin, die horizontalen Beschleunigungen, die das Flugzeug erfährt, ständig zu messen und dann durch zeitliche Integration ein erstes Mal die Geschwindigkeit und ein zweites Mal die Verschiebung auf der Erdoberfläche zu erhalten.
Auf zwei senkrechten Achsen:
- Messung der Beschleunigung γBerechnung der Geschwindigkeit: v = γ t v0Berechnung der Verschiebung: x = ½ γt² v0t x0
Vereinfacht ausgedrückt misst die Beschleunigung die Geschwindigkeitsänderungsrate: Wenn bei einer Beschleunigung von 2 m/s/s oder 2 m/s² die Anfangsgeschwindigkeit v0 7 m/s beträgt, beträgt sie eine Sekunde später 9 m /S.
Das Gleiche gilt für die Geschwindigkeit, die die Geschwindigkeit der Positionsänderung misst. Wenn Sie sich mit einer Geschwindigkeit von 10 m/s von Ihrem Startpunkt x0 entfernen, sind Sie eine Sekunde später 10 Meter weiter entfernt.
Wenn wir dem System während der Ausrichtungsphase die genaue Position unseres Startpunkts angeben und die Beschleunigungen in zwei senkrechten Richtungen messen, können wir daher jederzeit wissen, in welche Richtung und mit welcher Geschwindigkeit wir uns bewegen. und endlich, wo wir sind. Es ist nichts anderes als das Prinzip der Wertschätzung, wird aber auf ganz bestimmte Systeme angewendet.
Die große Schwierigkeit liegt in der notwendigen Präzision der Beschleunigungsmesser und in ihrer Positionierung relativ zur Erde. Für diesen letzten Punkt wird wiederum das Gyroskop verwendet.
INS-Trägheitsplattformen
Die ersten Systeme für die Zivilluftfahrt erschienen in den 1960er Jahren.
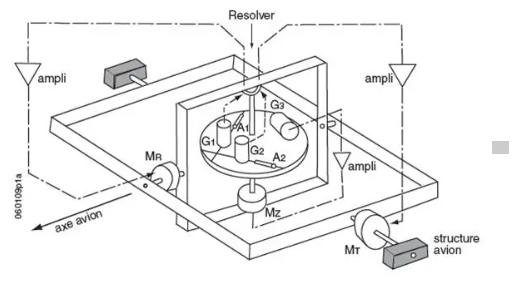
Im INS-System (Inertial Navigation System) sind zwei Beschleunigungsmesser A1 und A2 im Winkel von 90° zueinander auf einer Plattform installiert, die von drei Gyroskopen G1, G2 und G3 horizontal gehalten wird. Beschleunigungsmesser messen daher nur Beschleunigungen in der horizontalen Ebene, die für die Navigation nur von Interesse sind.
Es müssen Lösungen gefunden werden, um zwei Hauptschwierigkeiten zu lösen:
- Halten Sie die Plattform vollkommen horizontal, um keine parasitären Beschleunigungen zu messen. Richten Sie die Beschleunigungsmesser korrekt in Bezug auf den Norden aus. Die gewählte Lösung besteht eher darin, ihre aktuelle Ausrichtung durch Berechnung zu bestimmen, als sie physisch auszurichten: Dies nennen wir den Wanderazimut.
Die wichtigsten Hersteller verfolgten leicht unterschiedliche Ansätze, um die gewünschte Präzision bei der Plattformstabilisierung zu erreichen.
Die auf B707 oder DC8 und später auf DC10 installierten Littons waren mit äußerst präzisen Gyroskopen ausgestattet, einem echten Uhrwerk!
Delco entschied sich mit dem Carousel IV, mit dem die meisten B747 und Concorde ausgestattet waren, für eine Plattform, die sich mit konstanter Geschwindigkeit um sich selbst drehte und die mechanische Präzession von viel ungenaueren Kreiseln maß und korrigierte, wie wir höher sahen.
Die Ausrichtungsphase ermöglicht es, die Plattform durch die Erfassung der Schwerkraft horizontal zu positionieren und die Ausrichtung der Beschleunigungsmesser durch die Erfassung des Erdrotationsvektors zu berechnen. In dieser Phase muss dem System der Startpunkt der Navigation durch Eingabe der Position des Flugzeugparkplatzes angegeben werden.
Die INS-Navigationszentren bieten viele Informationen zur aktuellen Navigation:
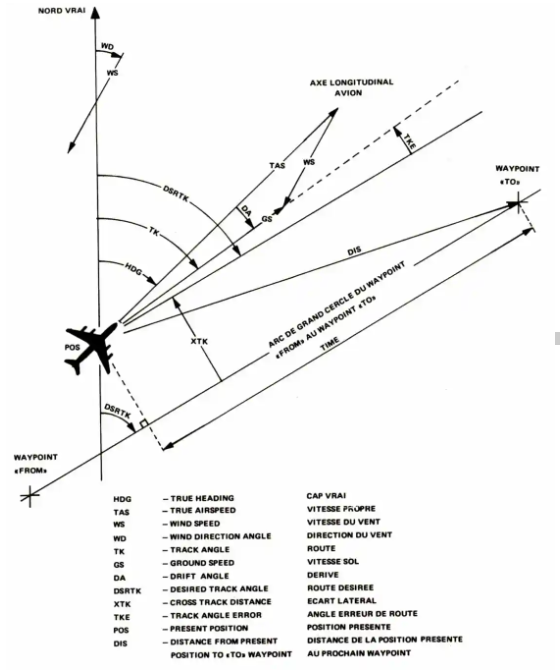
Die Namen und Akronyme können von System zu System variieren, wir finden jedoch fast immer die gleichen gemessenen oder berechneten Daten.
Dabei handelt es sich jedoch um sehr zerbrechliche und sehr teure Präzisionsmechanismen, sowohl in der Anschaffung als auch in der Wartung …
STRAP-DOWN-Systeme
Das aktuelle Konzept namens „Strap Down“ oder Orientierungserkennung erschien später mit Gyrolasern. Letztere emittieren Laserstrahlung, die eine geschlossene Bahn, ein Dreieck oder ein Quadrat, beschreibt.
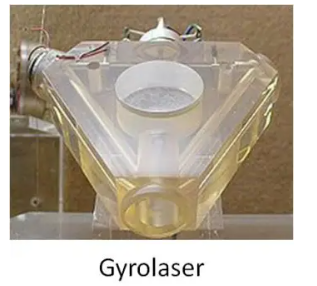
Wir messen den Positionsunterschied des Strahls beim Eintreffen, der es ermöglicht, die Bewegungen des Flugzeugs zu messen und daraus seine Position im Verhältnis zur Erde abzuleiten. Es sind nicht mehr Gyroskope, die eine Plattform stabilisieren, sondern Gyrometer, die die Bewegungen des Flugzeugs messen.
Im IRS (Inertial Reference System) gibt es diesmal drei Beschleunigungsmesser, die direkt in einer flugzeugspezifischen Referenz fixiert sind.
Dank dreier Laserkreisel sind die Computer jederzeit in der Lage, die Position jedes Beschleunigungsmessers im Raum zu bestimmen und daraus die Beschleunigungen in der horizontalen Ebene und damit den Geschwindigkeitsvektor über Grund und die Verschiebung auf der Oberfläche abzuleiten Erde.
In beiden Fällen sind diese Systeme daher in der Lage, das Flugzeug auf eine Bodenbahn zu steuern. Die Grunddaten, nämlich der Geschwindigkeitsvektor (wahrer Kurs Geschwindigkeit über Grund) und die momentane Position, werden in einem Computer verwendet, um das Flugzeug auf der von der Besatzung festgelegten Flugbahn zu steuern. Zu Beginn waren dies autonome Führungssysteme: Litton 51 und Delco Carousel. Für Delco bestand außerdem die Möglichkeit, Positionen zu mischen und Positionsanpassungen aus DME heraus vorzunehmen.
Die Littons des DC10 und des aktuellen IRS stellen nur die Grundelemente für AeraNav- oder FMS-Computer bereit, die die Flugbahn global mit allen verfügbaren Systemen verwalten.
Die Genauigkeit eines Trägheitsnavigationssystems hängt von der seit Beginn der Navigation verstrichenen Zeit ab. Es kann ohne Anpassung 1 Nm/h erreichen.
Tritt an einem Inertialsystem eine Störung auf, und sei es auch nur für kurze Zeit, geht die momentane Position verloren, die Maschine weiß nicht mehr, wo sie sich befindet!!! Zum Schutz vor möglichen Stromausfällen sind Trägheitssysteme mit einer eigenständigen Batterie ausgestattet.
Es gibt auch eine ATTITUDE-Funktion, mit der Sie bei Bedarf Lageinformationen von einem ADI oder einem PFD sowie Kreiselkursinformationen abrufen können, die als Kurskonservative verwendet und daher regelmäßig neu angepasst werden können ...
In dieser Navigationseinheit, Kurseinheit Trägheitseinheit, war die verbleibende Schwachstelle die Messung des magnetischen Kurses, die immer bei Abflug- und Ankunftsverfahren oder bei der Radarführung verwendet wird. Mit dem Aufkommen von Strap-Down-Plattformen und der zunehmenden Leistungsfähigkeit von Computern entstand die Idee, auf Strömungsventile und Kompasskupplungen zu verzichten, was Anfang der 1980er Jahre beim Airbus A310 erfolgte.
Außer dem Notkompass gibt es heute keinen Sensor mehr für das Erdmagnetfeld. Die auf den PFD- oder ND-Bildschirmen angezeigten magnetischen Kurse stammen aus dem vom IRS gemessenen tatsächlichen Kurs, zu dem der in der Datenbank gespeicherte Wert der magnetischen Deklination addiert wird. Darüber hinaus gibt es eine Möglichkeit (Norm/True-Umkehrer bei B747-400), zur Navigation in Polarregionen auf eine echte Kursanzeige umzuschalten. Wir können uns durchaus vorstellen, dass wir in nicht allzu ferner Zukunft nicht mehr von Magnetkursen sprechen werden!
Mit diesen Systemen erreichen wir das ultimative Ziel des Navigators: jede Route unabhängig von den Flugbedingungen autonom und mit großer Präzision absolvieren zu können. Und außerdem navigieren wir so schnell wie möglich und folgen dabei immer einem großen Kreis!
NAVIGATION PAR SATELLIT
Es ist heutzutage unmöglich, über Navigation zu sprechen, ohne GPS zu erwähnen, das in unserem modernen Leben allgegenwärtig ist, sei es in Autos oder in den meisten Smartphones!
Im Allgemeinen sollten wir über GNSS (Global Navigation Satellite System) sprechen, das es ermöglicht, die Position mithilfe einer Satellitenkonstellation zu bestimmen. Zwei Systeme sind heute in Betrieb:
- das amerikanische GPS-System NAVSTAR, besser bekannt als GPS für Global Positioning System; das russische GLONASS-System für GLObal NAvigation Satellite System.
Das modernere und präzisere europäische GALLILEO-Projekt ist weit hinter dem Zeitplan zurückgeblieben und daher nicht wirklich einsatzbereit ...
Sie alle funktionieren nach dem gleichen Prinzip: Durch Messung der Laufzeit der von Satelliten ausgesendeten Signale werden Kugelpositionen bestimmt.
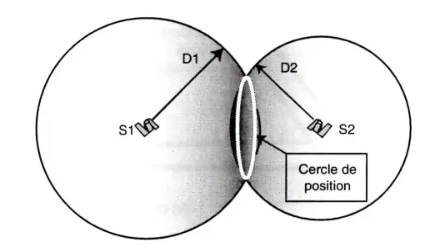
Der Schnittpunkt zweier dieser Kugeln ergibt einen Positionskreis.
Der Empfang eines dritten Satelliten ermöglicht die Bestimmung zweier möglicher Positionspunkte.
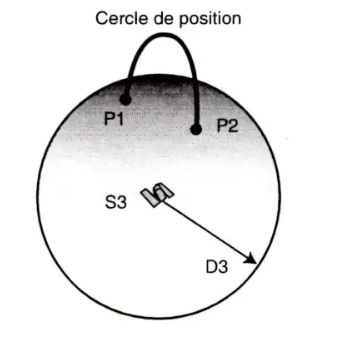
In der Praxis wird ein vierter Satellit erforderlich sein, um eine gute Präzision bei der Position und Einstellung der Uhr zu erreichen, und sogar ein fünfter, um die Kohärenz des Systems zu kontrollieren.
Die durchschnittliche Genauigkeit von Standard-GPS liegt in 95 % der Fälle bei etwa 15 m, was 0,008 Nm entspricht, also völlig ausreichend für RNP (Requested Navigation Precision) bis einschließlich 0,3.
Tatsächlich nutzen die meisten Bordsysteme nur das amerikanische GPS-System NAVSTAR…
Im Luftverkehr werden Satellitennavigationssysteme lediglich zur Neuausrichtung autonomer, inertialer Navigationssysteme eingesetzt. Sie werden aus mehreren Gründen nicht als primäre Navigationssysteme, sondern aufgrund ihrer Präzision als vorrangiges Mittel zur Ausrichtung verwendet:
- Bei den GPS- und GLONASS-Systemen handelt es sich um militärische Systeme, die direkt von den Eigentümerstaaten abhängig sind und daher auf eigene Initiative unterbrochen oder beeinträchtigt werden können. Bestimmte Regionen der Welt sind schlecht abgedeckt (Polarregionen). Es gibt Zeiten, in denen die Empfangsredundanz der Satelliten nicht ausreicht um höchste Präzision zu gewährleisten.
Darüber hinaus ist es jederzeit möglich, die Ausrichtung der Systeme durch das/die GPS(s) zu deaktivieren…
DAS FMS
Vor langer Zeit mit dem AeraNav der DC10 aus dem Jahr 1971 begonnen, sind wir nun dank des FMS (Flight Management System) zu einer globalisierten Verwaltung der Flugbahn gelangt. Beim DC10 hatten wir mit den damaligen Mitteln Schluss gemacht: Taschenrechner mit 48 KB RAM, Datenbank auf Magnetbandkassette, unpraktisch und sehr teuer... daher der jetzige Misserfolg. Aber die Prinzipien waren da und werden heute fast identisch übernommen!!!
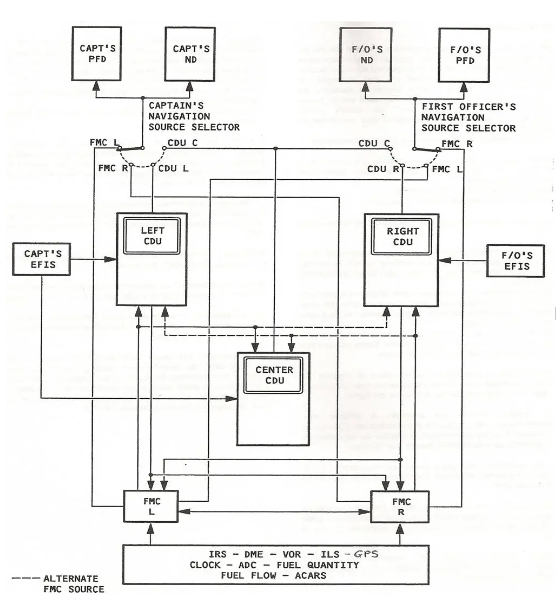
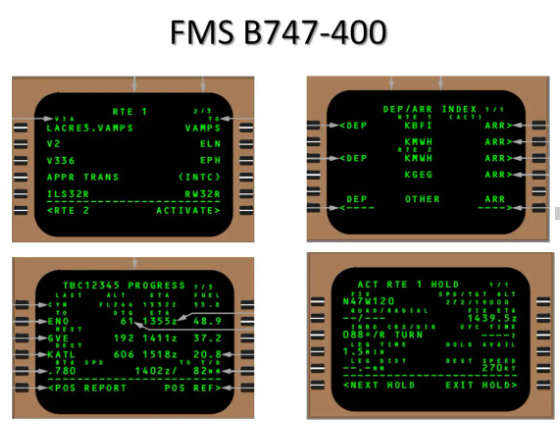
Auf der B747-400, wie oben dargestellt, umfasst das FMS-System zwei FMC-Rechner (Flight Management Computer), die alle verfügbaren Informationen sammeln, um die horizontalen (L-NAV) oder vertikalen (V-NAV) Flugbahnen zu berechnen und so ein feinkörniges Management zu ermöglichen Es erfasst neben vielen anderen Funktionen auch den Kraftstoffverbrauch und verteilt seine Informationen sowohl an die CDU- als auch an die PFD- und ND-Bildschirme.

Um in dem Bereich zu bleiben, der uns heute interessiert, horizontale Navigation oder laterale Navigation LNAV, wird das FMS zunächst das IRS verwenden, das den Cv, den Rv, den GS und die momentane Position bereitstellt. Die Positionen der verschiedenen verfügbaren IRS werden gemischt, um eine möglichst wahrscheinliche Position zu erhalten (Dreifachmischung), und diese wird durch die verfügbaren Funkmittel angepasst, an deren Spitze heute GPS steht. Aber so sehr wir ohne GPS fliegen können, so sehr können wir kaum ohne mindestens ein IRS auskommen!!!
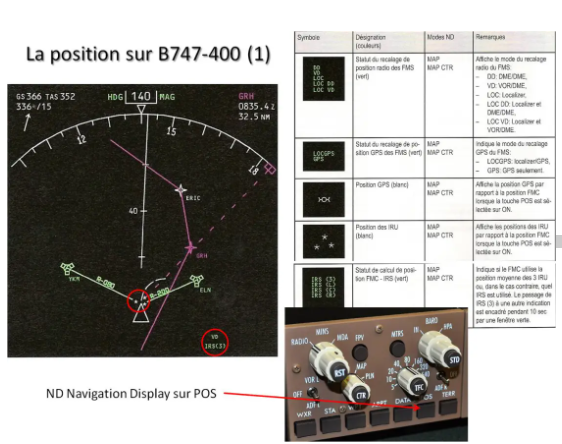
Wir können uns ein Bild von der Präzision der verschiedenen Komponenten machen, indem wir die ND beobachten, die in dem Beispiel hier anzeigt, dass wir uns in Triple Mixing, IRS (3) und VOR DME-Registrierung (VD) befinden. Durch Drücken der POS-Taste auf der EFIS-Steuerbox erscheinen drei kleine Sterne, die die Trägheitspositionen der drei IRS im Verhältnis zur Position des FMS darstellen, die durch die Spitze des Dreiecks symbolisiert wird und die Nase des Flugzeugs darstellt.
Um Alarme aufgrund übermäßiger Längengradabweichungen zu vermeiden, wird die Dreifachmischfunktion automatisch deaktiviert, wenn der Breitengrad 84°N oder 84°S überschreitet.
Wenn ein oder zwei GPS-Geräte verfügbar sind, erhalten wir auch deren Position. Diese werden in der Regel an der Nase des Flugzeugs angebracht, da dies das bevorzugte Mittel zur Ausrichtung ist.
Wenn der Breitengrad 88,5° N oder S überschreitet, wird die GPS-Ausrichtung, sofern noch verfügbar, automatisch deaktiviert.
Das B747-400 FMS ist nicht in der Lage, die vertikale Verschiebung der Pole zu bewältigen. Es ist verboten, auf einem Breitengrad größer als 89° Nord oder Süd zu fliegen.
Über die Positionsgenauigkeit können Sie sich auch auf Seite POS 2/3 des FMS informieren.
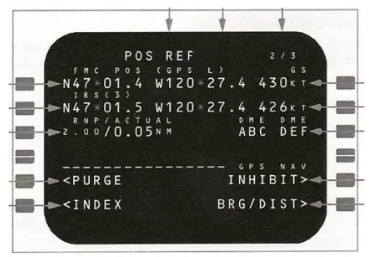
Wir finden insbesondere die Position des FMC und seine Anpassungsquelle, hier das linke GPS, die IRS-Position, hier die Triple-Mix-Position (3), und die Präzision der Position, die tatsächliche Navigationspräzision ANP, die hier mit 0,05 Nm bewertet wird.
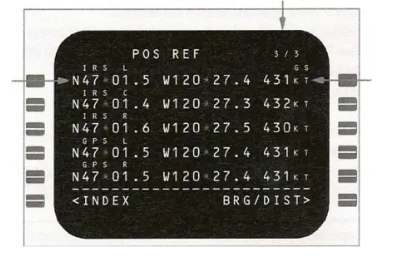
Auf der Seite POS 3/3 können Sie die Position jedes IRS und jedes GPS herausfinden.
Durch Drücken von BRG/DIST wird die Abweichung von Peilung und Entfernung von der FMC-Position angezeigt, d. h. die Werte, die die Symbole auf dem ND-Bildschirm positionieren.

Auf der Seite PROGRESS 2 finden wir einige der von den Trägheitseinheiten bereitgestellten Informationen: den Wind mit Quer- und Achskomponenten oder die XTK-Querspur.
Die FMCs ermöglichen auch die Durchführung der Oberflächennavigation (RNAV) dank einer Datenbank, die es ermöglicht, die Luftwege durch die Erstellung eines Flugplans, der Abflug- und Ankunftsbahnen SID und STAR zu verfolgen, Anflüge, OFFSETs und Wartezeiten an der Rennstrecke durchzuführen , usw.
Im Falle eines Ausfalls beider FMCs ermöglichen die MCDUs die Durchführung einer Notfallnavigation, ähnlich wie beim INS.
ABSCHLUSS
Wir sehen, dass es uns nach und nach gelungen ist, uns dem idealen System zu nähern, das die Navigation in jedem Teil der Welt mit immer größerer Präzision und unter allen Bedingungen ermöglicht. All dies hat es ermöglicht, den Flugverkehr erheblich zu sichern, aber auch die Abstände zwischen den Flugzeugen zu verringern und damit die Kapazität des Luftraums zu erhöhen und die Mängel der Landfunkleiteinrichtungen auszugleichen. Modernste Systeme ermöglichen mittlerweile Anflüge mit immer geringeren Minima.
Auch wenn all dies den Eindruck erwecken kann, dass die Karten sehr einfach sind oder nicht mehr nützlich sind, ist es immer nützlich zu wissen, wie sie funktionieren und wie wir darauf verzichten können, falls leider eine Panne auftritt. Das war das bescheidene Ziel dieser Präsentation…