




Después de haber visto cómo definir la trayectoria, ahora nos preguntaremos cómo seguirla.
En este artículo estudiaremos brevemente el funcionamiento de los diferentes medios de navegación, y veremos que es un poco historia, aunque no todas las avionetas cuentan con los últimos avances técnicos y siguen navegando como Mermoz (o casi). !
LE COMPAS MAGNÉTIQUE
El primer instrumento de navegación fue sin duda la brújula magnética.
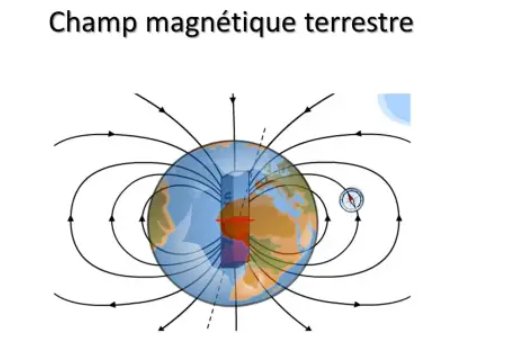
Fueron los chinos quienes, hacia el año 1000, fueron los primeros en utilizar un imán para orientarse utilizando el campo magnético terrestre.
También parece que las aves migratorias utilizan el campo magnético de esta tierra para sus largos viajes...
La brújula magnética consta de una rosa de rumbo unida a un imán permanente.
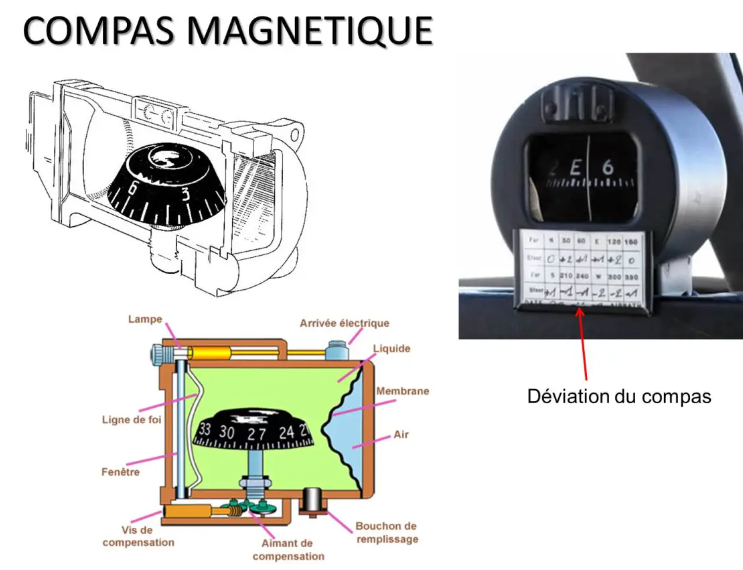
Bajo su línea de rumbo podemos leer el rumbo magnético seguido por el avión, o más precisamente lo que llamamos rumbo de la brújula. Por lo tanto, parece la herramienta ideal para seguir, con rumbo constante, una línea de rumbo.
Pero la brújula magnética tiene varios defectos.
En primer lugar, al estar compuesta esencialmente de un imán, la brújula magnética es sensible a las masas metálicas y a los campos electromagnéticos de los aviones, lo que contamina sus indicaciones con un error llamado desviación de la brújula. Se mide periódicamente en cada aeronave por los servicios de mantenimiento y se indica en el instrumento.
Por lo tanto, será necesario corregir la lectura de la brújula para esta desviación para determinar el rumbo magnético real.
Además, su referencia no es el Norte verdadero, en dirección al Polo Norte, sino un Polo Norte magnético cuya posición geográfica no es exactamente la del Polo Norte.
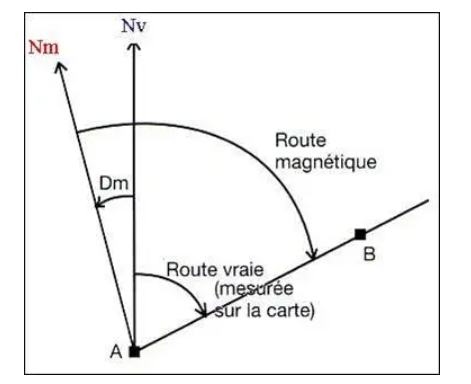
La diferencia entre Nv y Nm se llama variación magnética Dm o variación magnética en inglés (VAR). Su valor, indicado en los mapas, varía de un lugar a otro del mundo y cambia gradualmente de año en año.
Se denota E o W dependiendo de si el Norte magnético está al este o al oeste del verdadero Polo Norte.
Para seguir, con esta brújula, la ruta verdadera Rv medida en el mapa, será necesario corregirla por el valor de la declinación para encontrar la ruta magnética Rm. En un rumbo más largo, la declinación cambiará. Por tanto, tendremos que evolucionar el Rm para mantenernos en la carretera. Por el contrario, si mantenemos un Rm constante, no seguiremos exactamente la línea de rumbo.
Si bien la declinación es actualmente muy baja o incluso nula en Francia, puede alcanzar más de 20° en determinadas regiones, en Terranova, en Canadá, por ejemplo, e incluso 40° o 50° en el norte del país (34°O en Iqaluit)! En este caso, no podemos descuidarlo…
Para obtener más información sobre este tema, puede consultar el artículo sobre instrumentos de a bordo: http://www.flightsim-corner.com/aller-plus-loin/navigation/instruments-de-bord
La brújula magnética está orientada según la componente horizontal del campo magnético terrestre. Su roseta se mantiene aproximadamente horizontal gracias a un contrapeso o con un sistema de flotador.
En las regiones polares, debido a la forma de las líneas de flujo del campo magnético terrestre, la componente horizontal se vuelve muy débil. Consideramos que cuando esta componente horizontal llega a ser inferior a 6 micro teslas, las indicaciones de la brújula ya no son válidas.
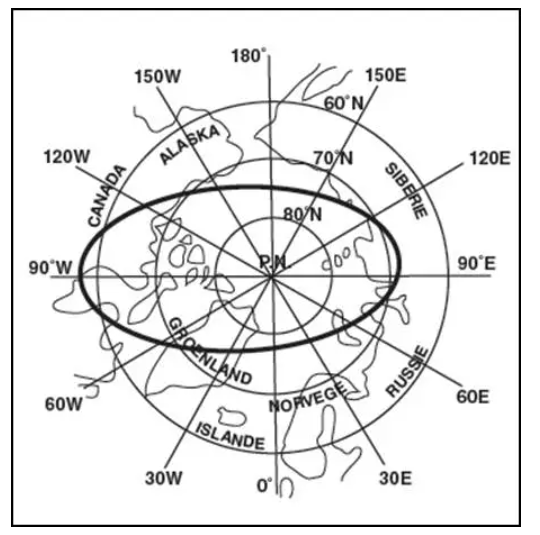
Las áreas geográficas correspondientes a esta situación están indicadas en los mapas que representan estas regiones.
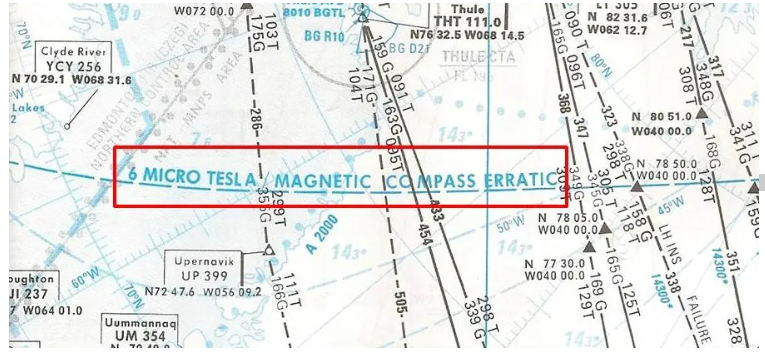
FSX o P3D no parecen afectados por este problema, y por tanto no simulan la pérdida de validez del rumbo magnético en estas regiones inhóspitas...
Además, las indicaciones de la brújula magnética son inestables y sensibles a las turbulencias. Cuando el avión está inclinado, el sensor magnético ya no está horizontal, lo que perturba la medición. Además, la brújula magnética equipada con contrapeso es sensible a la aceleración.
Como resultado, sus indicaciones sólo son válidas en vuelo horizontal estabilizado, lo que dificulta su uso en giros e inutilizable para guiar el avión a través de un piloto automático, por ejemplo.
EL CONSERVADOR DEL CABO
Para remediar un cierto número de defectos de la brújula magnética, se utilizaron las cualidades del giroscopio. Esto tiene la ventaja de mantener una dirección fija con respecto al espacio absoluto, lo que tiene ventajas y desventajas.
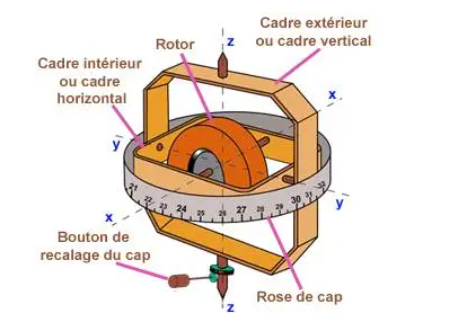
El conservador de rumbo, o giroscopio direccional, está equipado con un giroscopio de dos grados de libertad (dos marcos) cuyo eje de la parte superior se mantiene horizontal.

Contrairement au compas magnétique, ses indications sont très stables et il est parfaitement utilisable en virage. Par contre, il faut le caler sur une référence de Nord, le Nord magnétique, le Nord vrai ou le Nord grille. De plus, il faut le recaler souvent car il ne gardera cette référence de calage que quelques temps et ce pour plusieurs raisons :
- En primer lugar, el giroscopio no es perfecto, no mantendrá siempre su dirección con respecto al espacio absoluto: a esto lo llamamos precesión mecánica y dependerá de la calidad mecánica del giroscopio. Entonces, la Tierra gira sobre él -incluso si El eje del giroscopio permanece apuntado hacia una estrella, por ejemplo (el espacio absoluto), por lo que girará del mismo modo que las estrellas parecen girar en el cielo: esto es la precesión astronómica. Su valor depende de la latitud en la que nos encontremos, y vale 15° x sen L por hora, cero en el ecuador pero máximo en los polos. Gira el norte del giroscopio hacia la derecha en el hemisferio norte y hacia la izquierda en el sur, ¡incluso si el avión permanece estacionario en tierra! Y si además queremos que indique el norte verdadero (o norte magnético en declinación constante) , también deberíamos corregir la convergencia de los meridianos cuando nos movemos sobre la Tierra: ¡este es el mapa de precesión!
¡Por supuesto, es demasiado complicado encargarse de todo eso cuando realizas un vuelo VFR corto! Pero es bueno saber que todas estas precesiones degradan la precisión del rumbo mostrado por su curador de rumbo. Cuando están en la misma dirección se suman y podemos llegar a valores importantes. Por tanto, es necesario reajustar el curso conservador con mucha regularidad. Generalmente, utilizamos el rumbo de la brújula magnética para restablecer el curador de rumbo.
FSX, P3D y X-Plane pueden simular estas precesiones siempre que la función esté activada. En este caso, es necesario reajustar periódicamente el giroscopio direccional...
LA BRÚJULA GIROMAGNÉTICA
Principio
Descubrimos así que las cualidades del giroscopio direccional corresponden prácticamente a los defectos de la brújula magnética y viceversa. Por lo tanto, se imaginó, naturalmente, combinar ambos para diseñar la brújula giromagnética.
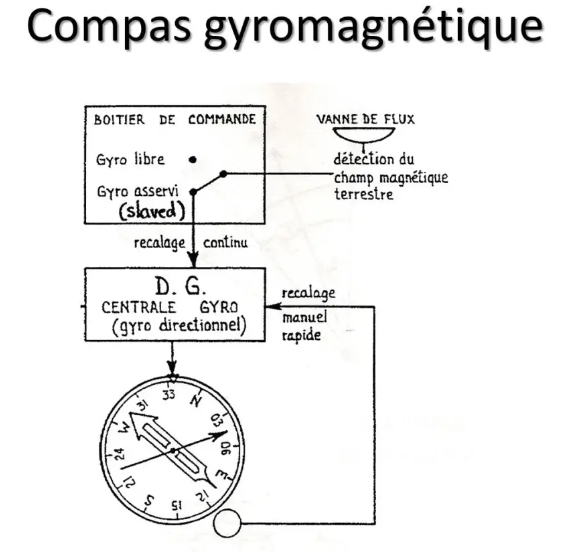
En este caso, el rumbo del giroscopio se sincroniza automáticamente con el rumbo magnético. Ya no es necesario reajustar el giroscopio. El sensor magnético es una válvula de flujo, normalmente instalada en el extremo del ala para alejarse de masas ferrosas y campos eléctricos, que proporciona información de rumbo magnético en forma eléctrica y que sincroniza el rumbo giroscópico a través de un acoplador de brújula. Este es el modo ESCLAVO.
Para poder utilizar esta brújula giromagnética en la zona de los 6 micro teslas, está previsto desactivar la sincronización con el rumbo magnético: se trata del modo DG o giro libre, donde el sistema funciona exactamente como un curador de rumbo. La diferencia es, sin embargo, que al ser este sistema más sofisticado y por tanto más caro, el giroscopio es de buena calidad con una precesión mecánica muy limitada.
La brújula tipo CAMINO POLAR
Las formas más elaboradas de este sistema se encontraron en aviones de largo recorrido que precedieron a la llegada de las centrales eléctricas de inercia.
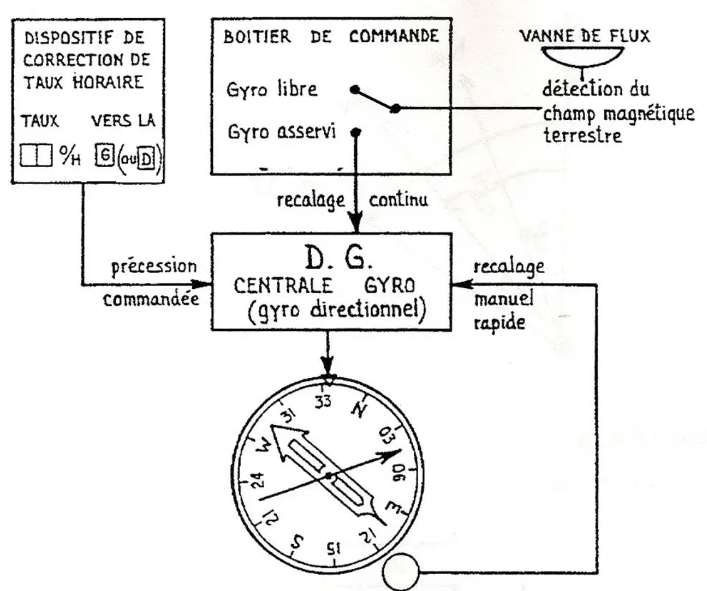
Así, el B707 o el DC8 estaban equipados con un sistema de girocompás de tipo Polar Path, que permitía, en modo Free Gyro, aplicar una tasa de corrección de tiempo al girocompás. Entonces podríamos seguir, con un rumbo giroscópico constante, la línea del mapa de cualquier mapa, y en particular los Mercators transversales u oblicuos.
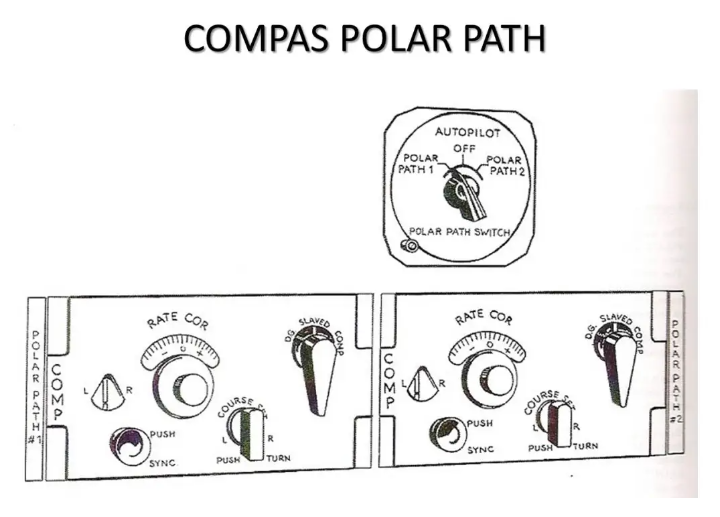
Pero para ello era mejor tener a bordo un navegante experimentado, que periódicamente reiniciaba su navegación por otros medios como radiocomunicaciones de largo alcance o navegación astronómica: ¡¡¡un asunto, por tanto, de profesionales!!!
Los aviones que siguieron a esta primera generación de aviones de largo alcance, como el B747-100/200/300 o el DC10, todavía estaban equipados con este tipo de sistema, pero la información de rumbo giroscópico procedía del giroscopio de acimut de las plataformas en la inercia del INS.
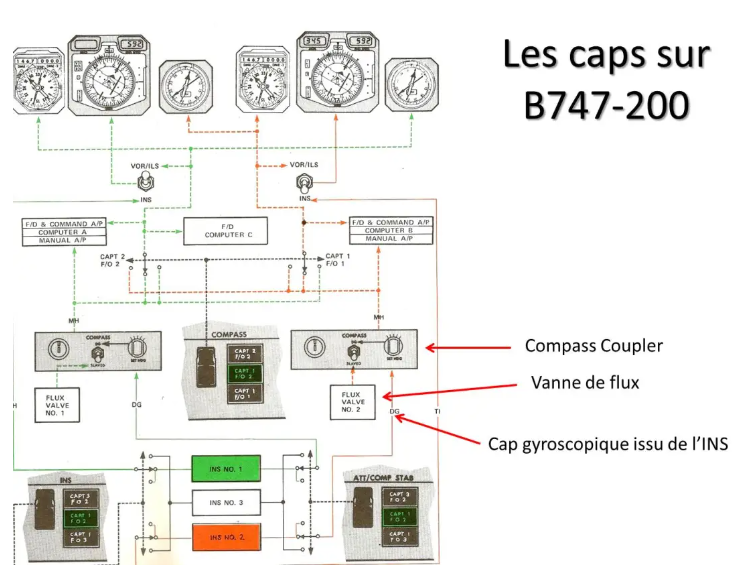
El acoplador de brújula todavía estaba presente con sus dos posibles modos SLAVED o DG (haga clic en la imagen para ampliarla).
Le DC10 avait cette particularité, avec ses INS Litton 58, de délivrer un cap gyro corrigé de la précession mécanique (très faible, quelques dixièmes de degrés par heure) et de la précession astronomique, ce qui avait pour effet d'annuler la rotation de la tierra. Por lo tanto, con un rumbo giroscópico constante, seguimos una línea recta con respecto a la Tierra, es decir, una ortodromía.
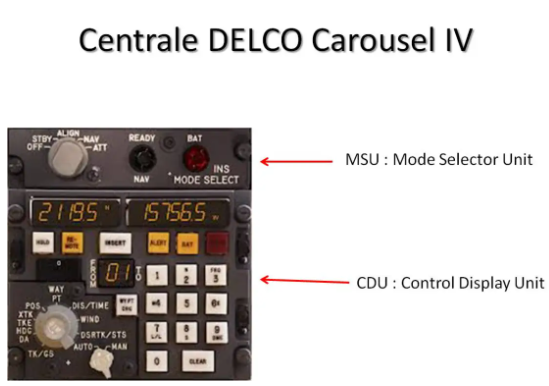
En B747, el INS DELCO Carrusel IV no presentaba esta particularidad, y su precesión mecánica, medida durante el alineamiento y almacenada en la memoria, podía alcanzar valores muy altos, del orden de 12°/h, lo que se sumaba a la precesión astronómica. ¡¡¡Podría alcanzar hasta 27°/h en las regiones polares!!!
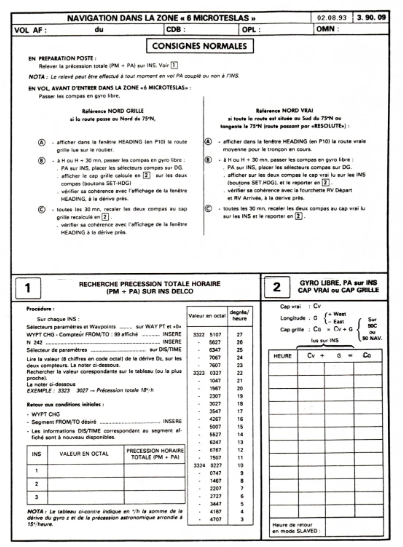
Un procedimiento de emergencia muy complicado permitió conocer esta precesión mecánica y, gracias a una hoja especial, calcular el rumbo del giroscopio para salir de la zona 6 micro teslas, en caso de emergencia.
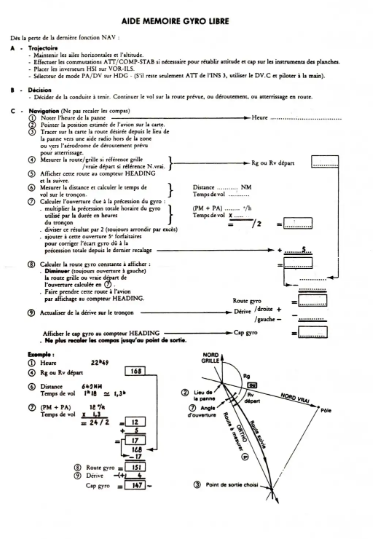
Entendemos mejor por qué era necesario hacer un curso específico antes de aventurarse en este tipo de áreas.
En cuanto al experimentado navegante, fue desembarcado, por supuesto, con la llegada del INS… ¡¡¡eso es un progreso!!!
TENIENDO EN CUENTA EL VIENTO
En todo lo que acabamos de ver, lo único que nos ha preocupado es mantener el rumbo, con la mayor precisión posible. ¡Pero la trayectoria a seguir es un camino! ¡Y obviamente no podemos plantearnos volar sólo en días sin viento!
Le triangle des vitesses
El efecto del viento se destaca en el triángulo de velocidad: el vector de velocidad relativo al aire está orientado según el rumbo y su medida corresponde a la velocidad natural TAS.
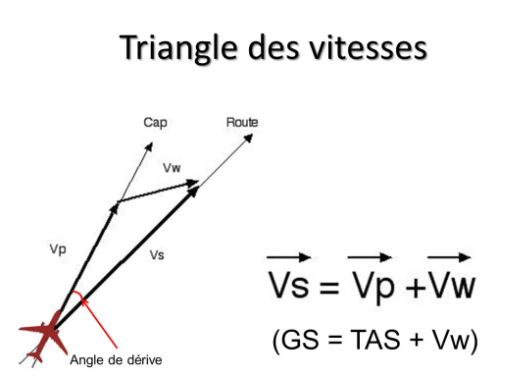
Haciendo la suma del vector con el vector viento, obtenemos el vector velocidad respecto al suelo orientado a lo largo de la ruta seguida. El ángulo entre el rumbo y el rumbo se llama ángulo de deriva.
Este hermoso dibujo es muy fácil de calcar en papel, ¡mucho más difícil de hacer en vuelo! Y, sobre todo, es necesario tener un conocimiento bastante preciso del viento.
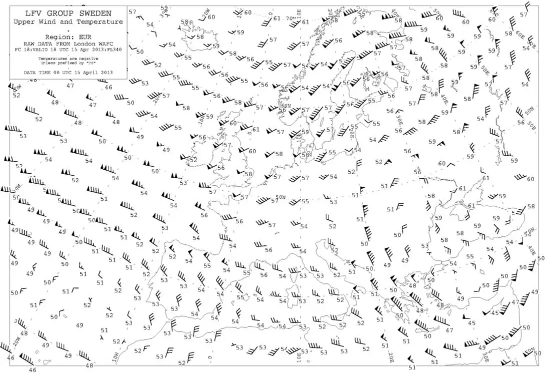
En cuanto a la preparación previa al vuelo, los servicios meteorológicos proporcionan pronósticos en forma de mapas de viento a diferentes altitudes.
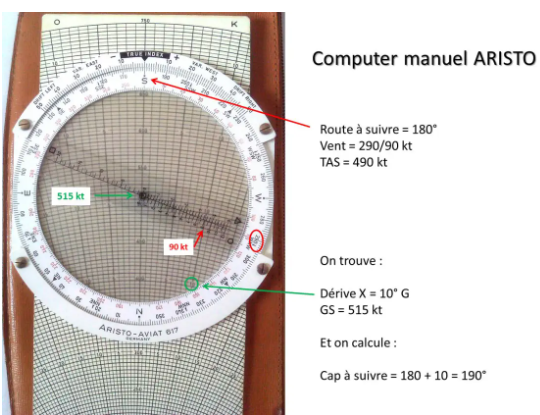
Métodos matemáticos precisos, cálculos mentales más aproximados o el uso de ordenadores manuales o electrónicos permiten calcular el ángulo de deriva y la velocidad de avance. Sabremos así qué rumbo debemos tomar para seguir la ruta prevista, así como la velocidad a la que recorreremos dicha trayectoria.
Aquí, por ejemplo, se explica cómo calcular la deriva y la velocidad de avance utilizando la computadora especializada ARISTO.
¡Pero esto es sólo una predicción! Y todo el mundo sabe que siempre existe un margen de error, a veces significativo, entre la predicción y la realidad...
Il a donc fallu trouver des moyens pour évaluer le vent subi en cours de vol. Et là, ce n’est pas très facile !
Para la deriva, si tienes la suerte de estar a la vista del suelo, puedes evaluarlo visualmente observando las marcas en el eje del avión: poco preciso...
El medidor derivativo
El derrapómetro, siguiendo un marcador de tierra colocado en una retícula, permitió medir la deriva... ¡¡¡con buen tiempo y más bien de día y en superficie!!!

Para la velocidad de avance, ciertos derivómetros (llamados cinemo-derivometros) también permitieron evaluarla…

Et puis il y a toujours le chronométrage d’un parcours qui permet de la calculer. Mais on voit tout de suite que la précision ne sera pas au rendez-vous, et même pratiquement impossible sur des parcours maritimes au long cours !!!
Navegación isobárica
Otro sistema, abandonado hace mucho tiempo, se utilizó en el mar para determinar el viento cruzado y la deriva. Esto es lo que llamamos navegación isobárica, de presión o de factor D.
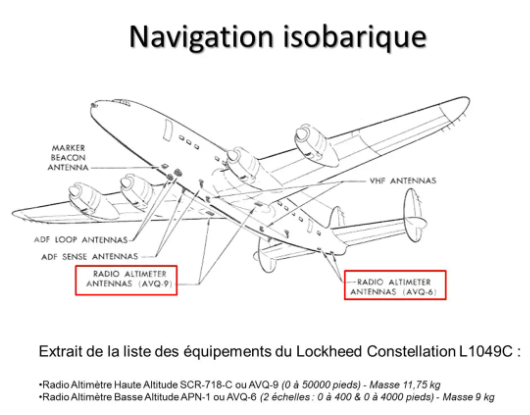
Era necesario disponer de un radioaltímetro de gran altitud capaz de medir la altitud real que, comparado con la altitud de presión (factor D), permitiera calcular la componente transversal del viento geostrófico (viento teórico) y por tanto la deriva... ¡Otra cuestión de navegante profesional!
Navegador Doppler
También han surgido sistemas electrónicos más precisos. Este es el caso del navegador del efecto Doppler.
Lorsque vous vous trouvez au bord d’un circuit automobile, le son produit par le bolide qui arrive change de tonalité lorsqu’il passe devant vous et s’éloigne : c’est l’effet Doppler qui fait que la fréquence du son émis par le mobile est modifiée par sa vitesse. Vous en avez peut-être été victimes sans le savoir puisque certains radars routiers fonctionnent sur ce principe !
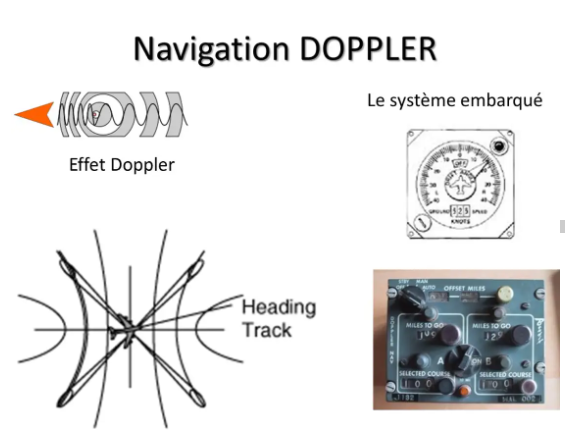
También se utilizó en aeronáutica para medir la velocidad respecto al suelo de los aviones y, combinando varios receptores, para medir también la deriva. El instrumento en la parte superior y derecha indicaba la velocidad de avance y la deriva.
Fue posible acoplarlo a un totalizador de navegación a estima (abajo a la derecha) y el sistema podría luego ser utilizado por el piloto automático (DC8 UTA).
Pero la precisión, a pesar de todo, no era excepcional, y la superficie demasiado lisa de algunos terrenos (el mar en calma, por ejemplo) provocaba que se perdieran las señales de retorno. Luego la navegación continuó con los últimos valores medidos que quedaron guardados en la memoria…!!!
OTROS MEDIOS DE NAVEGACIÓN
Por lo tanto, entendemos que era necesario, en ese momento, disponer de otros medios para recalibrar la navegación, al menos periódicamente, para pretender una precisión adecuada...
Navegación astronómica
Uno de los medios de adaptación más sencillos de implementar fue, por analogía con la marina, la navegación astronómica. Pero, a diferencia de los barcos, la alta velocidad de crucero de los aviones, especialmente los jets, complicará significativamente el problema: un miembro de la tripulación fue asignado especialmente para este trabajo que exigía un gran rigor en la aplicación de los procedimientos.
Para los aviones presurizados se utilizó un sextante periscópico, para tener una vista panorámica sobre el avión, equipado con un sistema de medición de la altura de la estrella durante los dos minutos que duró el avistamiento de cada estrella.
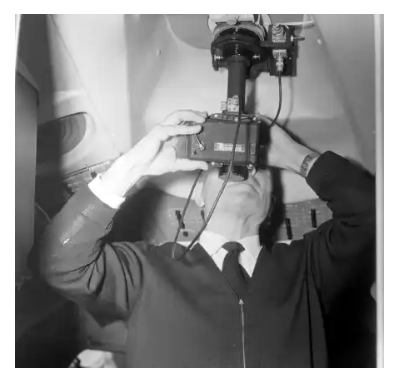
También en este caso la precisión fue muy relativa, y sólo permitió constatar una discrepancia a posteriori, sin poder anticipar el resto del vuelo...
Medios de radio de largo alcance
Además de los medios de radio clásicos, VOR y NDB, que podían utilizarse hasta el límite de su alcance útil, unos 200 Nm, existían medios de largo alcance que permitían restablecer la navegación a estima.
La consola
El Consol era una radiobaliza mejorada que transmitía en la banda de 250-350 kHz. Dependiendo de la posición del avión con respecto a la baliza, obtuvimos una cierta cantidad de puntos y líneas de código Morse que debíamos contar, que correspondían a las posiciones marcadas en los mapas.
Una baliza de este tipo se encontraba en Bretaña, en Ploneis, cerca de Quimper. Fue arrestada en 1970.
el loran
Loran (Long RAnge Navigation) es un sistema de posicionamiento hiperbólico que consta de dos transmisores, un maestro y un “esclavo”. El posicionamiento se realiza midiendo la diferencia en los tiempos de propagación de la señal emitida por los dos transmisores, formando el lugar geométrico de los puntos con la misma diferencia una hipérbola.
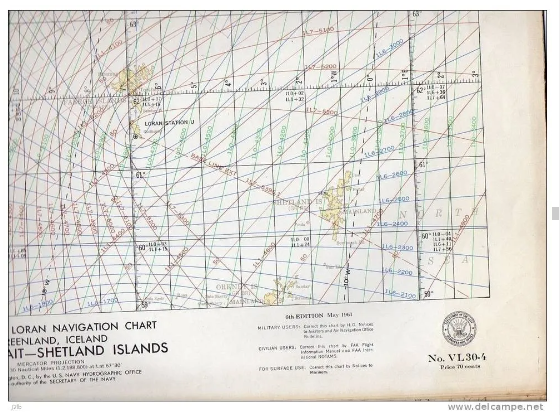
En los mapas de navegación se indicaban las redes de hipérbola de los diferentes pares de transmisores.
Se han desarrollado varias versiones: Loran A, Loran C, Loran E. Loran C todavía está en servicio como medio de respaldo para embarcaciones en caso de falla del GPS.
Al igual que la navegación astronómica, el uso de estos medios radioeléctricos a bordo de los aviones requería la presencia de un navegador y, para Loran, un equipo de recepción específico...
Pero en cuanto a la navegación astronómica, también aquí sólo disponemos de medios para controlar la posición a posteriori, que sólo permiten recalibrar la navegación que se realiza, a priori, a estima, con todos los riesgos que necesariamente degradan la precisión.
El sistema OMEGA
Unas breves palabras de paso sobre un sistema que sólo hizo una breve aparición en el inventario de recursos de radio de largo alcance. El sistema OMEGA, creado por el ejército estadounidense a finales de los años 1960, en plena Guerra Fría, funcionaba según el mismo principio que LORAN, pero en un rango de frecuencia mucho más bajo, la banda VLF (Very Low Frequency). ), alrededor de 12 kHz.
Ocho transmisores permitieron cubrir todos los océanos del mundo. Sólo uno estaba en territorio francés, en la costa occidental de la isla Reunión. La altura de los mástiles de las antenas, de poco más de 400 m, las convertía a menudo en las construcciones más altas del país...!
La instalación, a bordo de los aviones, incluía un receptor totalmente automático y una CDU bastante comparable a la del INS, del que hablaremos poco después.
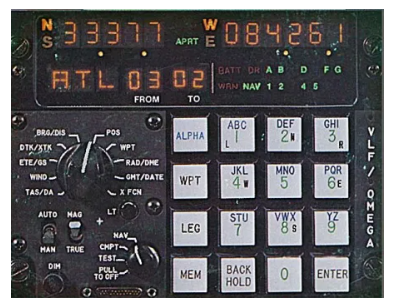
La précision nominale était d’environ 1,5 Nm, mais les problèmes de propagation dans cette gamme de fréquence pouvaient la dégrader sensiblement. Néanmoins, le système OMEGA était certifié comme moyen de navigation dans la zone MNPS de l’Atlantique Nord, en association avec un système INS.
La llegada de sistemas satelitales como el GPS supuso muy rápidamente el fin del sistema OMEGA para la aviación civil. Como los costes de mantenimiento de las estaciones terrestres eran muy elevados, se decidió detenerlas en 1997.
NAVEGACIÓN DE INERCIA
Por tanto, lo ideal sería poder orientar el avión para que siga directamente la ruta elegida sin necesidad de pasar por el rumbo, y saber medir la velocidad real con respecto al suelo, sean cuales sean las condiciones de vuelo... !
C’est la navigation par inertie qui va apporter la solution.
No se trata de una idea reciente, ya que un sistema de este tipo ya se había utilizado para guiar misiles, en particular los alemanes V1 y V2, durante la Segunda Guerra Mundial. La dificultad consistía en producir equipos suficientemente fiables y precisos para poder utilizarlos en vuelos de varias horas de duración en el contexto de las operaciones cotidianas.
Principio de funcionamiento
El principio es medir constantemente las aceleraciones horizontales que experimenta el avión luego, integrándolas con respecto al tiempo, una primera vez obtenemos la velocidad, y una segunda vez obtenemos el desplazamiento sobre la superficie de la tierra.
En dos ejes perpendiculares:
- Medida de aceleración γCálculo de velocidad: v = γ t v0Cálculo de desplazamiento: x = ½ γt² v0t x0
En pocas palabras, la aceleración mide la tasa de cambio de velocidad: con una aceleración de 2 m/s/s o 2 m/s², si la velocidad inicial v0 es de 7 m/s, un segundo después será de 9 m /s.
Lo mismo ocurre con la velocidad, que mide la velocidad de cambio de posición. Si te alejas de tu punto de partida x0 a una velocidad de 10 m/s, un segundo después estarás 10 metros más lejos.
Si indicamos al sistema, durante la fase de alineación, la posición exacta de nuestro punto de partida, y si medimos las aceleraciones en dos direcciones perpendiculares, podremos saber permanentemente en qué dirección y a qué velocidad nos movemos. y finalmente dónde estamos. No es más que el principio de estima pero aplicado a sistemas muy concretos.
La gran dificultad reside en la necesaria precisión de los acelerómetros y en su posicionamiento con respecto a la Tierra. Para este último punto, nuevamente se utilizará el giroscopio.
Plataformas de inercia INS
Los primeros sistemas dedicados a la aviación civil aparecieron en los años 1960.
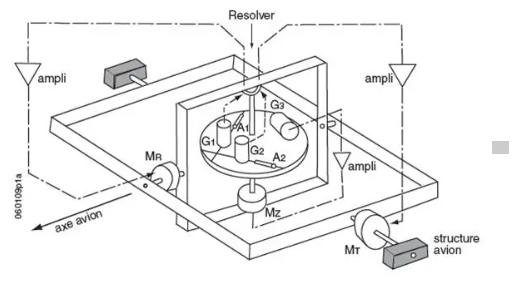
En el sistema INS (Inertial Navigation System), dos acelerómetros A1 y A2, a 90° entre sí, están instalados sobre una plataforma mantenida horizontalmente por tres giroscopios G1, G2 y G3. Por tanto, los acelerómetros sólo miden aceleraciones en el plano horizontal, las únicas de interés para la navegación.
Será necesario encontrar soluciones para resolver dos dificultades principales:
- mantener la plataforma perfectamente horizontal para no medir aceleraciones parásitas, orientar correctamente los acelerómetros en relación al norte. La solución elegida será más bien determinar su orientación actual mediante cálculos en lugar de orientarlos físicamente: esto es lo que llamamos azimut errante.
Los principales fabricantes adoptaron enfoques ligeramente diferentes para lograr la precisión deseada en la estabilización de la plataforma.
Los Litton instalados en el B707 o el DC8 y, más tarde, en el DC10 estaban equipados con giroscopios extremadamente precisos, ¡un verdadero mecanismo de relojería!
Delco, con el Carousel IV que equipaba la mayoría de los B747 y Concorde, optó por una plataforma que giraba sobre sí misma, a velocidad constante, y que medía y corregía la precesión mecánica de unos giroscopios mucho menos precisos, como hemos visto más altos.
La fase de alineación permite colocar la plataforma horizontalmente detectando la gravedad y calcular la orientación de los acelerómetros detectando el vector de rotación de la Tierra. Es durante esta fase que es necesario indicar al sistema el punto de inicio de la navegación introduciendo la posición de la estación de estacionamiento de aeronaves.
Los centros de navegación del INS proporcionan mucha información sobre la navegación actual:
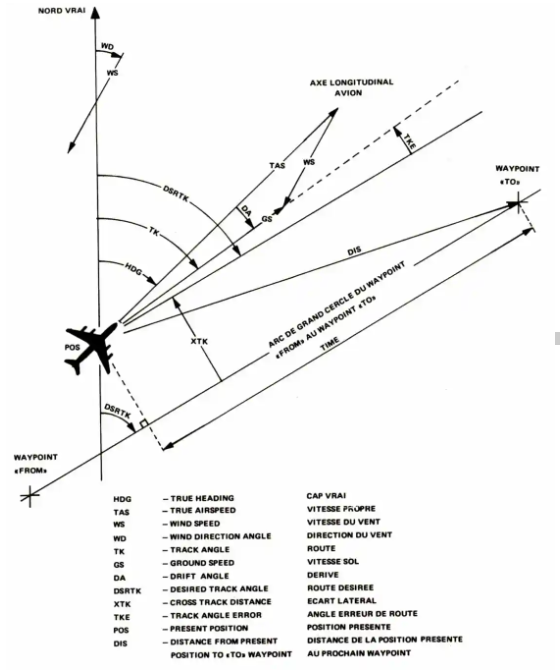
Los nombres y siglas pueden variar de un sistema a otro pero casi siempre nos encontramos con los mismos datos medidos o calculados.
Mais ce sont des mécanismes de précision très fragiles et très coûteux, aussi bien à l’achat qu’à l’entretien…
Sistemas de correas
El concepto actual llamado “Strap Down” o detección de orientación apareció más tarde, con los girolásers. Estos últimos emiten radiación láser que describe un camino cerrado, un triángulo o un cuadrado.
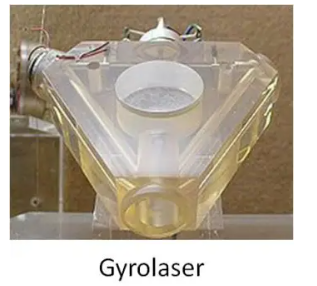
Medimos la diferencia de posición del rayo en llegada, lo que permite medir los movimientos del avión y por tanto deducir su posición con respecto a la tierra. Ya no son los giroscopios los que estabilizan una plataforma, sino los girómetros los que miden los movimientos del avión.
En el IRS (Sistema de Referencia Inercial), esta vez hay tres acelerómetros que se fijan directamente en una referencia específica de la aeronave.
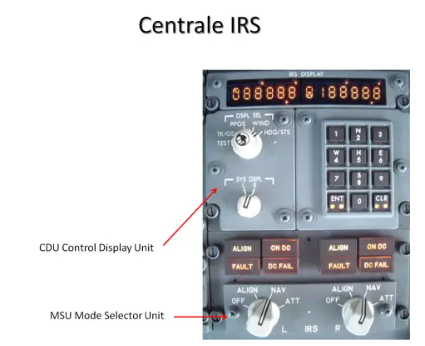
Grâce à trois gyrolasers, les calculateurs sont capables, à chaque instant, de déterminer la position dans l'espace de chaque accéléromètre, et d'en déduire les accélérations dans le plan horizontal, et donc le vecteur vitesse sol et le déplacement à la surface de la tierra.
Por tanto, en ambos casos, estos sistemas son capaces de dirigir la aeronave en una trayectoria terrestre. Los datos básicos que son el vector de velocidad (rumbo real velocidad de avance) y la posición instantánea se utilizan dentro de una computadora para guiar el avión en la trayectoria definida por la tripulación. Al principio se trataba de sistemas autónomos capaces de guiar: Litton 51 y Delco Carousel. Para Delco, también existía la posibilidad de mezclar posiciones y realizar ajustes de posición desde DME.
Los Litton del DC10 y el IRS actual sólo proporcionan los elementos básicos para los ordenadores AeraNav o FMS que gestionan la trayectoria globalmente con todos los sistemas disponibles.
La precisión de un sistema de navegación inercial dependerá del tiempo transcurrido desde el inicio de la navegación. Puede alcanzar 1 Nm/h sin ningún ajuste.
Si se produce una avería en un sistema inercial, aunque sea muy brevemente, se pierde la posición instantánea, ¡¡¡la máquina ya no sabe dónde está!!! Para protegerse contra posibles fallos eléctricos, los sistemas inerciales están equipados con una batería autónoma.
También hay una función de ACTITUD que le permite recuperar, si es necesario, información de actitud de un ADI o un PFD, e información de rumbo del giroscopio para utilizarla como conservador de rumbo y, por lo tanto, reajustarla periódicamente...
En esta unidad de navegación, unidad de rumbo unidad inercial, el eslabón débil restante era la medición del rumbo magnético siempre utilizado en los procedimientos de salida y llegada o en la guía por radar. Con la llegada de las plataformas Strap Down y la creciente potencia de los ordenadores, surgió la idea de prescindir de válvulas de flujo y acopladores de brújula, algo que se hizo con el Airbus A310 a principios de los años 80.
Aparte de la brújula de emergencia, hoy en día ya no existe ningún sensor del campo magnético terrestre. Los rumbos magnéticos mostrados en las pantallas PFD o ND provienen del rumbo verdadero medido por el IRS al que se suma el valor de la declinación magnética almacenado en la Base de Datos. Además, existe una forma (inversión normal/verdadera en B747-400) de cambiar a una visualización de rumbo real para navegar en regiones polares. ¡Ciertamente podemos imaginar que en un futuro no muy lejano ya no hablaremos de rumbos magnéticos!
Con estos sistemas conseguimos el objetivo final del navegante: poder realizar cualquier ruta de forma autónoma, con gran precisión, sean cuales sean las condiciones de vuelo. ¡Y además navegamos lo más rápido posible siguiendo siempre un gran círculo!
NAVEGACIÓN POR SATÉLITE
Hoy en día es imposible hablar de navegación sin mencionar el GPS, omnipresente en nuestra vida moderna, ya sea en los coches o en la mayoría de los smartphones.
De manera más general, deberíamos hablar de GNSS (Sistema Global de Navegación por Satélite), que permite determinar la posición mediante una constelación de satélites. Actualmente hay dos sistemas operativos:
- el sistema GPS estadounidense NAVSTAR, más comúnmente llamado GPS por Sistema de Posicionamiento Global, y el sistema ruso GLONASS, por GLObal NAvigation Satellite System.
El proyecto europeo GALLILEO, más moderno y más preciso, está muy retrasado y, por tanto, no está realmente operativo...
Todos funcionan según el mismo principio: medir el tiempo de viaje de las señales emitidas por los satélites determina las posiciones esféricas.
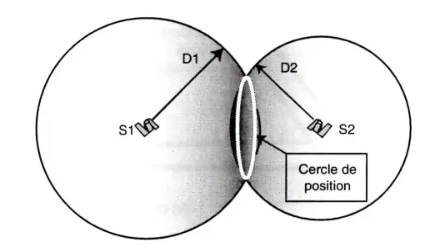
La intercepción de dos de estas esferas da un círculo de posición.
La recepción de un tercer satélite permite determinar dos posibles puntos de posición.
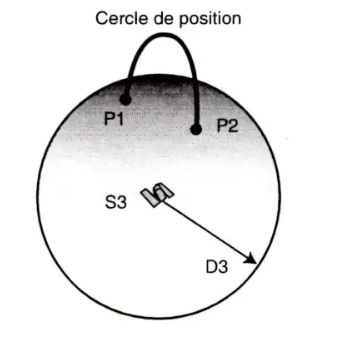
En la práctica, será necesario un cuarto satélite para obtener una buena precisión en la posición y ajuste del reloj, e incluso un quinto para controlar la coherencia del sistema.
La precisión media del GPS estándar es de unos 15 m en el 95% de los casos, lo que representa 0,008 Nm, por lo que es suficiente para una RNP (precisión de navegación solicitada) de hasta 0,3 inclusive.
De hecho, la mayoría de los sistemas de a bordo sólo utilizan el sistema GPS americano NAVSTAR…
En el transporte aéreo, los sistemas de navegación por satélite sólo se utilizan para realinear sistemas de navegación inerciales y autónomos. No se utilizan como sistemas primarios de navegación sino como medio prioritario de alineación, debido a su precisión, por varios motivos:
- Los sistemas GPS y GLONASS son sistemas militares que dependen directamente de los Estados propietarios, que por tanto pueden interrumpirlos o degradarlos por su sola iniciativa. Algunas regiones del mundo están mal cubiertas (regiones polares). Hay períodos en los que la redundancia de recepción de los satélites es insuficiente. para garantizar la mejor precisión.
Además, siempre es posible desactivar la alineación de los sistemas mediante el(los) GPS(es)…
EL FMS
Iniciados hace mucho tiempo con el AeraNav del DC10 que data de 1971, ahora hemos alcanzado la gestión globalizada de la trayectoria gracias al FMS (Flight Management System). En DC10, habíamos prescindido de los medios de la época: calculadora con 48 KB de RAM, base de datos en casete de cinta magnética, poco práctico y muy caro... de ahí el fracaso del momento. ¡¡¡Pero los principios estaban ahí y se han adoptado casi de forma idéntica hoy!!!
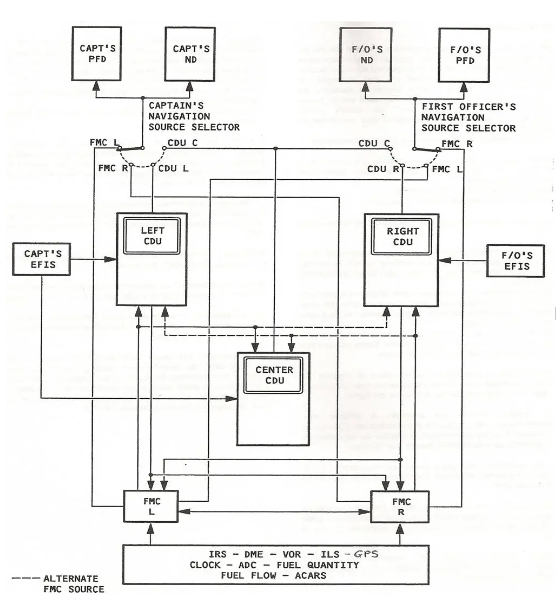
En el B747-400, ejemplo presentado anteriormente, el sistema FMS incluye 2 calculadoras FMC (Flight Management Computer) que recopilan toda la información disponible para calcular las trayectorias horizontales (L-NAV) o verticales (V-NAV), lo que permite una gestión detallada. consumo de combustible, entre otras muchas funciones… y distribuye su información tanto a la CDU como a las pantallas PFD y ND.

Para permanecer en la zona que hoy nos interesa, navegación horizontal o navegación lateral LNAV, el FMS utilizará en primer lugar el IRS que proporcionará el Cv, el Rv, el GS y la posición instantánea. Las posiciones de los diferentes IRS disponibles se mezclarán para tener una posición más probable (triple mezcla), y esta será ajustada por los medios radiofónicos disponibles, a la cabeza de los cuales hoy se encuentra el GPS. Pero por mucho que podamos volar sin GPS, ¡¡¡difícilmente podemos prescindir de al menos un IRS!!!
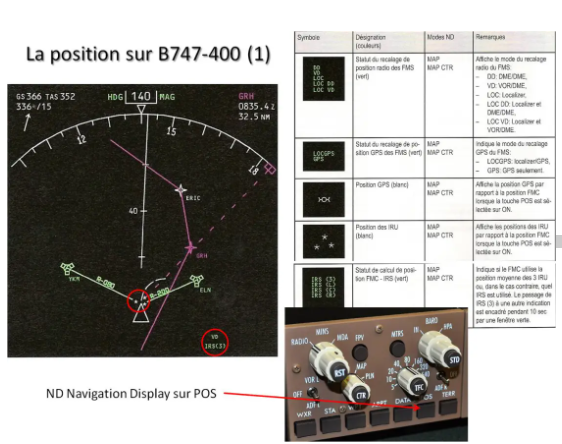
Podemos hacernos una idea de la precisión de los diferentes componentes observando el ND que indica, en el ejemplo aquí, que estamos en Triple Mixing, IRS (3) y registro VOR DME (VD). Al presionar el botón POS en la caja de control EFIS, aparecen tres pequeñas estrellas que representan las posiciones inerciales de los tres IRS en relación con la posición del FMS simbolizada por la parte superior del triángulo, que representa el morro de la aeronave.
Para evitar alarmas por desviaciones excesivas de longitud, cuando la latitud supera los 84°N o 84°S, la función de triple mezcla se desactiva automáticamente.
Si disponemos de uno o dos GPS también tendremos su posición, generalmente fijado al morro del avión ya que es el medio preferido de alineación.
Cuando la latitud supera los 88,5° N o S, la alineación GPS, si aún está disponible, se desactiva automáticamente.
El B747-400 FMS no es capaz de gestionar el desplazamiento vertical de los polos. Está prohibido volar a una latitud superior a 89° Norte o Sur.
También puede obtener información sobre la precisión de la posición en la página POS 2/3 del FMS.
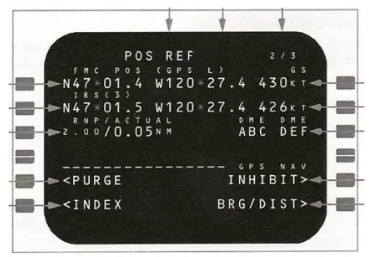
Encontramos en particular la posición del FMC y su fuente de ajuste, aquí el GPS izquierdo, la posición IRS, aquí la posición Triple Mix (3), y la precisión de la posición, Actual Navigation Precision ANP evaluada aquí en 0,05 Nm.
En la página POS 3/3 podrás conocer la posición de cada IRS y cada GPS.
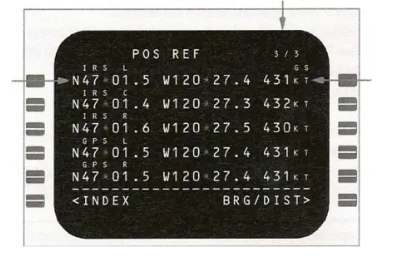
En appuyant sur BRG/DIST, c’est l’écart en relèvement et distance par rapport à la position FMC qui sera indiqué, c’est à dire les valeurs qui positionnent les symboles sur l’écran ND.

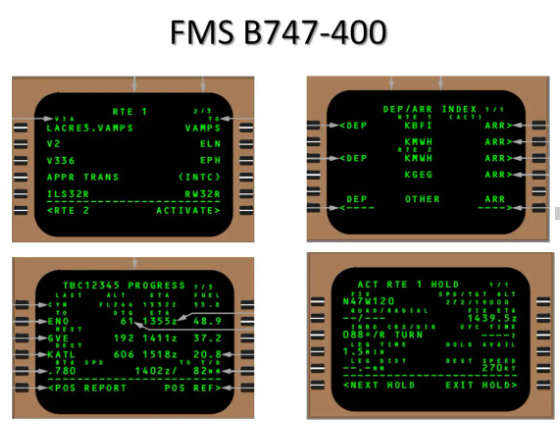
Encontramos, en la página PROGRESS 2, parte de la información que proporcionan las unidades inerciales: el viento con componentes transversales y en eje o la trayectoria transversal XTK.
Los FMC también permiten realizar la navegación de superficie (RNAV) gracias a una base de datos, que permite seguir las vías aéreas mediante la construcción de un plan de vuelo, trayectorias de salida y llegada SID y STAR, realizar aproximaciones, OFFSETs, esperas en el circuito. , etc.
En caso de avería de ambos FMC, los MCDU permiten realizar una navegación de emergencia similar a la que se hacía con el INS.
CONCLUSIÓN
Vemos que, poco a poco, hemos conseguido acercarnos al sistema ideal, aquel que permite la navegación en cualquier parte del mundo, cada vez con mayor precisión, en todas las condiciones. Todo esto ha permitido asegurar en gran medida el tráfico aéreo, pero también reducir la distancia entre las aeronaves y, por tanto, aumentar la capacidad del espacio aéreo, y compensar las deficiencias de los medios de radioguía terrestres. Los sistemas más modernos permiten actualmente realizar aproximaciones con mínimos cada vez más bajos.
Aunque todo esto puede dar la ilusión de una gran facilidad o de que las tarjetas ya no sirven, siempre es útil saber cómo funciona y cómo podríamos prescindir de ellas en el caso de que, lamentablemente, se produjera una avería. Esta era la modesta ambición de esta presentación…